【泡泡一分钟】用于地下矿井建图,导航和操纵的自主机器人的设计
每天一分钟,带你读遍机器人顶级会议文章
标题:Design of an Autonomous Robot for Mapping, Navigation, and Manipulation in Underground Mines
作者:Robert Losch, Steve Grehl, Marc Donner, Claudia Buhl, Bernhard Jung.
来源:2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
编译:孙钦
审核:颜青松,陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

地下矿井是一个危险的工作环境,而机器人可以帮助减少人类的风险。传统的机器人,传感器和软件在地底苛刻的环境下工作通常不可靠。本文分析了需求,提出了一种能够在地下自主导航并用机械臂操纵物体的机器人设计。机器人的基座是一个由电动机驱动且能够承受恶劣环境的坚固的四轮平台。它配备了彩色,深度相机,光源,激光扫描仪,惯性测量单元以及机械臂。
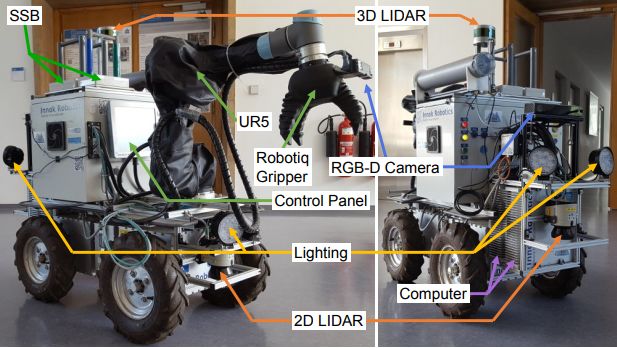
图1 搜索机器人Julius
表1,机器人平台参数
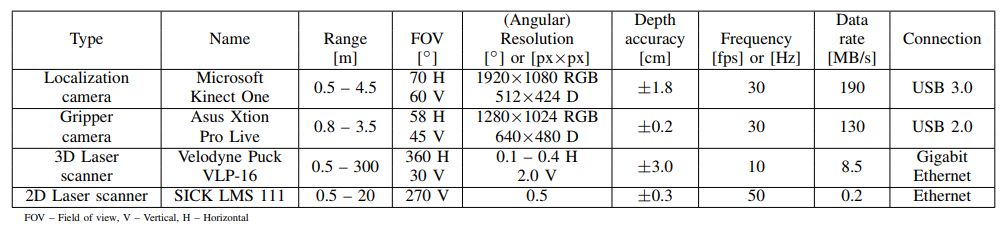
表2 机器人中的传感器设置
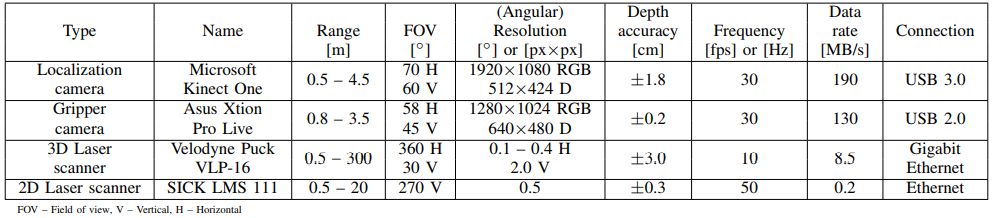
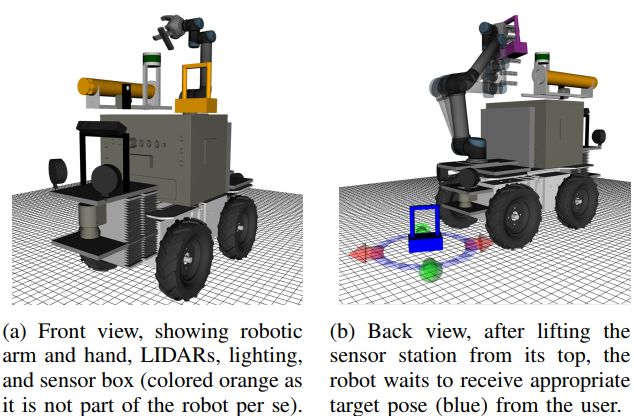
图2 机器人Julius在rviz中显示的URDF模型
我们进行了测试建图和自主导航两个实验。建立一个包括闭环的75米长的路线地图,该地图在很大程度上定性地匹配原始地图。在先前创建的第二条150米长的直线上测试自动驾驶也是成功的。然而,没有闭环,旋转错误会导致创建的地图出现明显的偏差。这些实验首次证明了机器人在地下的可操作性。
1,建图实验:
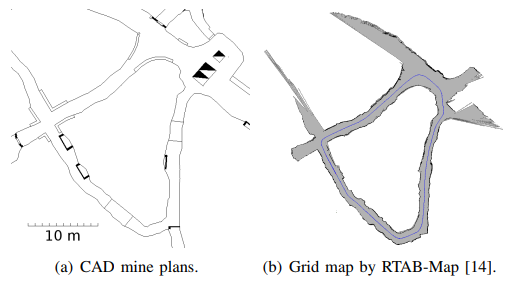
图3 左图为由测量师创建CAD图,右图为由RTAB-Map方法创建的占用栅格地图。
2,自动驾驶实验
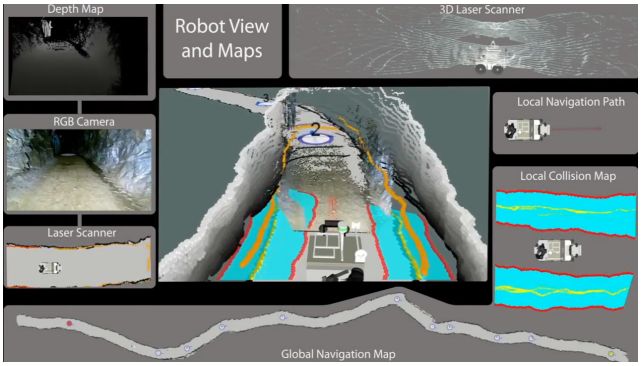
图4 运动过程中接受到的数据显示。图中左上角为有Kinetic相机的深度和RGB图,底部为占用栅格地图,显示航点以及Julius在地图中位置。
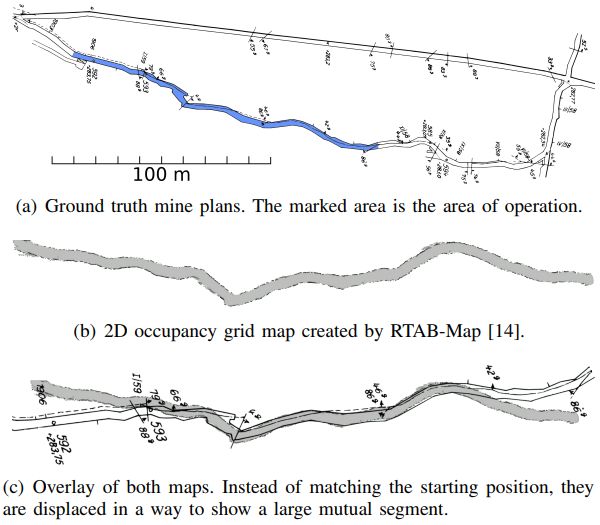
图5 地图比较

Abstract
Underground mines are a dangerous working environment and, therefore, robots could help putting less humans at risk. Traditional robots, sensors, and software often do not work reliably underground due to the harsh environment. This paper analyzes requirements and presents a robot design capable of navigating autonomously underground and manipulating objects with a robotic arm. The robot's base is a robust four wheeled platform powered by electric motors and able to withstand the harsh environment. It is equipped with color and depth cameras, lighting, laser scanners, an inertial measurement unit, and a robotic arm. We conducted two experiments testing mapping and autonomous navigation. Mapping a 75 meters long route including a loop closure results in a map that qualitatively matches the original map to a good extent. Testing autonomous driving on a previously created map of a second, straight, 150 meters long route was also successful. However, without loop closure, rotation errors cause apparent deviations in the created map. These first experiments showed the robot's operability underground.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com





