
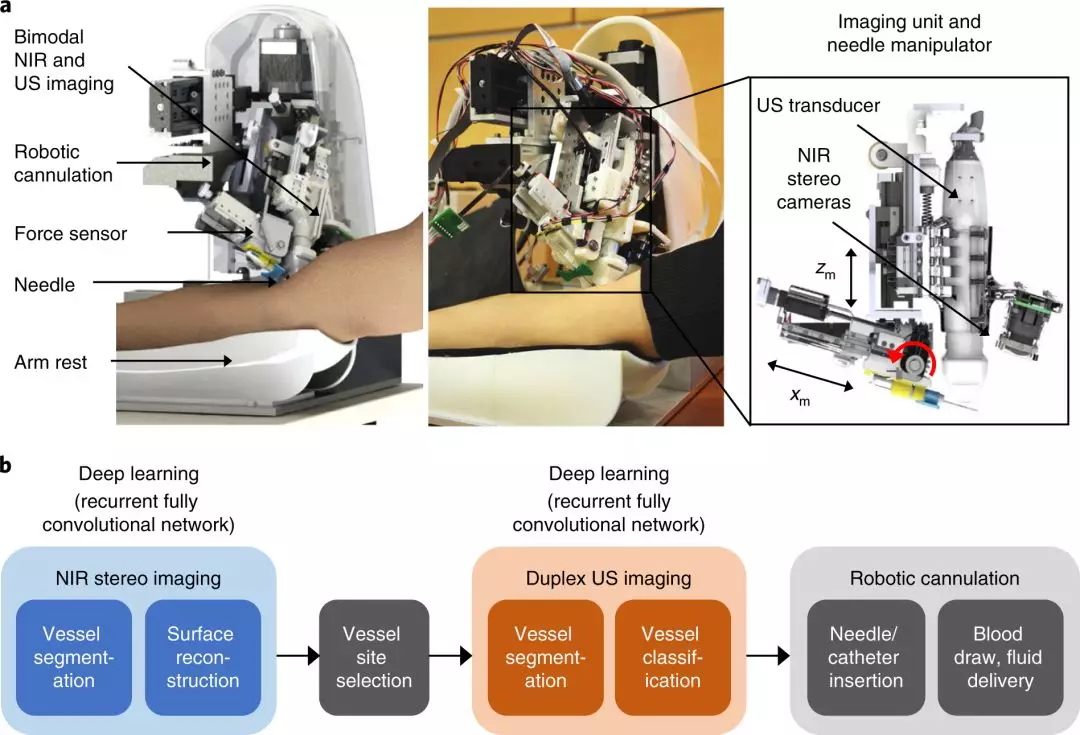
医疗机器人已经证明了操作经皮器械进入软组织解剖的能力,同时工作超越人类感知和灵活性的极限。机器人技术进一步提供了在资源有限的情况下以最少的监督完成关键任务的自主性。在这里,我们提出了一种便携式机器人设备,能够将针头和导管引入可变形的组织,如血管,以自主地抽血或输送液体。机器人插管是由一系列深度卷积神经网络的预测驱动的,这些神经网络从多模态图像序列中编码时空信息来指导实时伺服。通过对志愿者的成像和机器人跟踪研究,我们证明了该设备在存在解剖变异和运动的情况下,对周围血管进行分割、分类、定位和跟踪的能力。然后,我们评估了机器人在幻肢和动物模型中难以获得血管的性能,并表明,与训练有素的操作员手工插管相比,该设备可以提高成功率和操作时间,特别是在具有挑战性的生理条件下。这些结果表明,自主系统有可能在复杂的视觉运动任务上超越人类,并展示了将这些能力转化为临床应用的一个步骤。
成为VIP会员查看完整内容
相关内容

专知会员服务
104+阅读 · 2019年10月22日
相关主题



相关VIP内容
专知会员服务
104+阅读 · 2019年10月22日
相关资讯
相关论文