【泡泡一分钟】基于全局相机一致性的超大规模分布式光束法平差(ICCV2017-4)
每天一分钟,带你读遍机器人顶级会议文章
标题:Distributed Very Large Scale Bundle Adjustment by Global Camera Consensus
作者:Runze Zhang, Siyu Zhu, Tian Fang, and Long Quan
来源:International Conference on Computer Vision (ICCV 2017)
播音员:水蘸墨
编译:陈建华 周平
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

规模日益增长的运动恢复结构问题在本质上被传统的一体化光束法平差优化框架所限制。在本文中,作者提出了一种分布式方法来处理这种超大规模结构的运动计算问题。
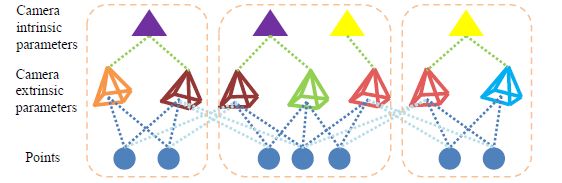
图1 分布式方案的示意图
首先,作者基于全局相机一致性,从经典优化算法——交替方向乘子算法(Alternating Direction Method of Multipliers, ADMM)中推导得到分布式方法的计算公式。其次,作者分析了在这种条件下上述分布式优化方法的收敛性,并确保该方法能够收敛。此外,作者特别采用过松弛和自适应方案来提高其收敛速度。然后,为了减少分布式计算的通信开销,作者提出对大规模的相机点可视图进行分割的方案。
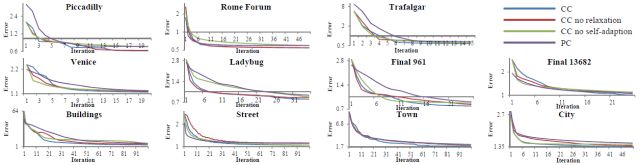
图2 不同方法的收敛曲线对比
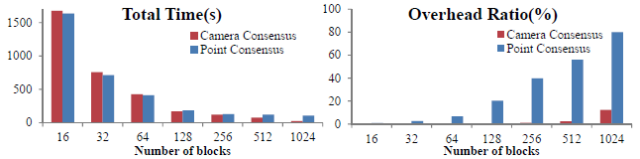
图3 分割方案的试验结果
最后,作者在超大规模的公开数据集以及航拍图像集上进行了相关试验,结果表明所提出的分布式方法在效率和精度上明显优于当前的主流算法。
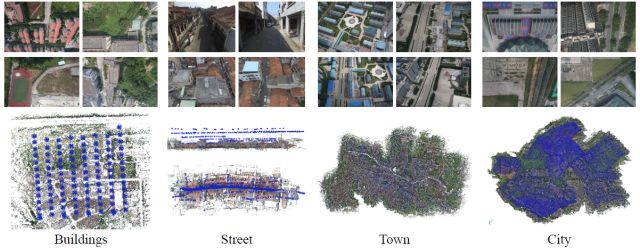
图4 本文所提出算法的试验结果

Abstract
The increasing scale of Structure-from-Motion is fundamentally limited by the conventional optimization framework for the all-in-one global bundle adjustment. In this paper, we propose a distributed approach to coping with this global bundle adjustment for very large scale Structure-from-Motion computation. First, we derive the distributed formulation from the classical optimization algorithm ADMM, Alternating Direction Method of Multipliers, based on the global camera consensus. Then, we analyze the conditions under which the convergence of this distributed optimization would be guaranteed. In particular, we adopt over-relaxation and self-adaption schemes to improve the convergence rate. After that, we propose to split the large scale camera-point visibility graph in order to reduce the communication overheads of the distributed computing. The experiments on both public large scale SfM data-sets and our very large scale aerial photo sets demonstrate that the proposed distributed method clearly outperforms the state-of-the-art method in efficiency and accuracy.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
百度网盘链接:https://pan.baidu.com/s/1kW0Vl1X 密码:mt3n
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com


