【泡泡一分钟】尺度空间中具备渐进大尺度不变性的图像匹配
每天一分钟,带你读遍机器人顶级会议文章
标题:Progressive Large Scale-Invariant Image Matching In Scale Space
作者:Lei Zhou, Siyu Zhu, Tianwei Shen, Jinglu Wang, Tian Fang, Long Quan
来源:IEEE International Conference on Computer Vision (ICCV 2017)
编译:李建禹
审核:颜青松 陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

目前图像匹配方法的能力仍然在本质上受到图像中尺度突变的限制。本文提出了一种尺度不变的图像匹配方法,以解决不同视角非常大尺度变化的问题。首先,借鉴尺度空间理论,将图像的尺度空间编码为紧凑的多尺度表示。然后,代替在一个步骤中尝试找到精确的特征匹配,本文提出了一个渐进的两段的方法:
第一步,基于有限尺度空间中的最优匹配和穷举匹配,确定尺度空间中的相关尺度级别,包括较早的特征对应。第二步,在对相关尺度等级的匹配进行鲁棒性约束后,同时生成图像相似性度量和特征对应。
本文对图像匹配性能在图像检索、特征匹配、从运动中恢复结构(SFM)等视觉任务中进行了深入的评估。结果表明,成功匹配融合了具有挑战性的高空低空尺度差异巨大的图像表明了本文提出方法的优越性。
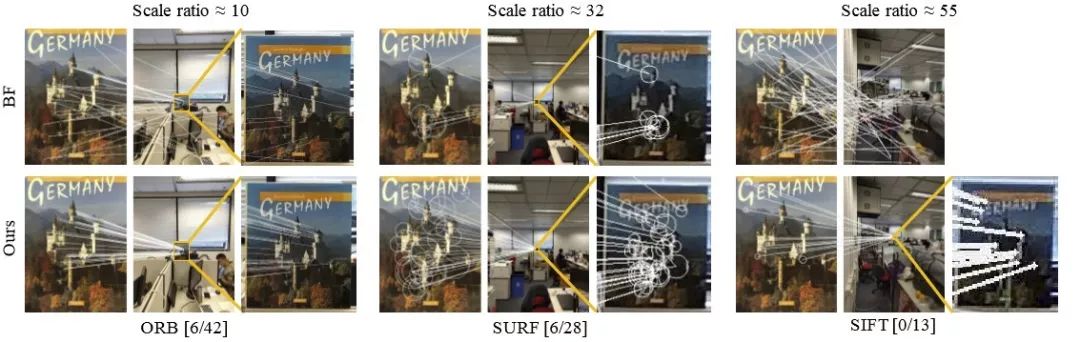
图1 在大尺度变化下本文匹配算法分别与ORB,SURF,SIFT匹配效果对比
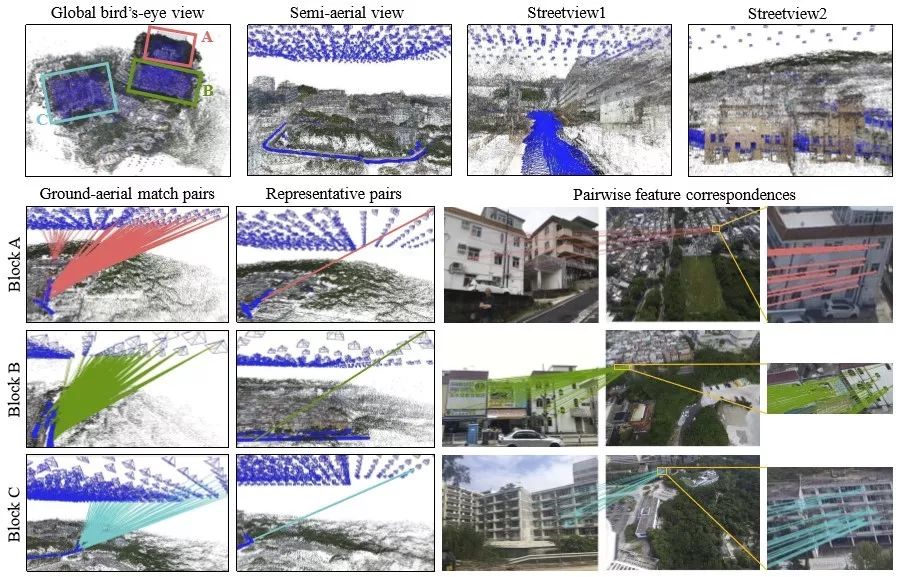
图2 本文算法在高空低空视角大尺度变化下的匹配效果

Abstract
The power of modern image matching approaches is still fundamentally limited by the abrupt scale changes in images. In this paper, we propose a scale-invariant image matching approach to tackling the very large scale variation of views. Drawing inspiration from the scale space theory, we start with encoding the image’s scale space into a compact multi-scale representation. Then, rather than trying to find the exact feature matches all in one step, we propose a progressive two-stage approach. First, we determine the related scale levels in scale space, enclosing the inlier feature correspondences, based on an optimal and exhaustive matching in a limited scale space. Second, we produce both the image similarity measurement and feature correspondences simultaneously after restricting matching between the related scale levels in a robust way. The matching performance has been intensively evaluated on vision tasks including image retrieval, feature matching and Structurefrom-Motion (SfM). The successful integration of the challenging fusion of high aerial and low ground-level views with significant scale differences manifests the superiority of the proposed approach.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com


