【泡泡一分钟】无监督学习的立体匹配方法(ICCV-2017)
每天一分钟,带你读遍机器人顶级会议文章
标题:Unsupervised Learning of Stereo Matching
作者:Chao Zhou, Hong Zhang, Xiaoyong Shen, Jiaya Jia
来源:International Conference on Computer Vision (ICCV 2017)
编译:张鲁
审核:颜青松 陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

卷积神经网络已展示了其在立体匹配代价学习方面的能力。近期的方法往往使用具有视差图真值的公开数据集进行参数学习。由于标注真实深度值的工作非常困难,可用于系统训练的数据非常有限,导致将系统用于实际应用中会相当困难。本文中,我们提出了一种无须人类监督的立体匹配代价学习框架。我们使用一种迭代式的方法更新网络参数。只用左-右一致性检查来指导训练过程。合适的匹配则会被选择出来并在后续迭代中作为训练数据。我们的系统最终可以收敛至一个稳定状态并甚至达到了与使用监督学习的方法相仿的性能表现。
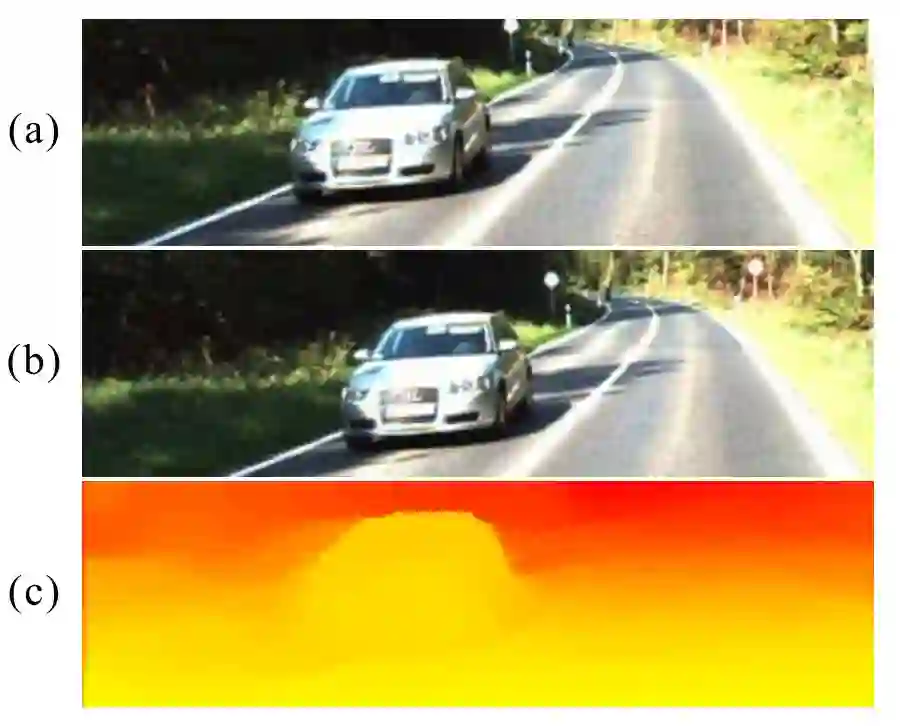
图1. 立体匹配过程使用了左目和右目图像作为输入(图(a)和(b)),并以视差图(c)作为输出。
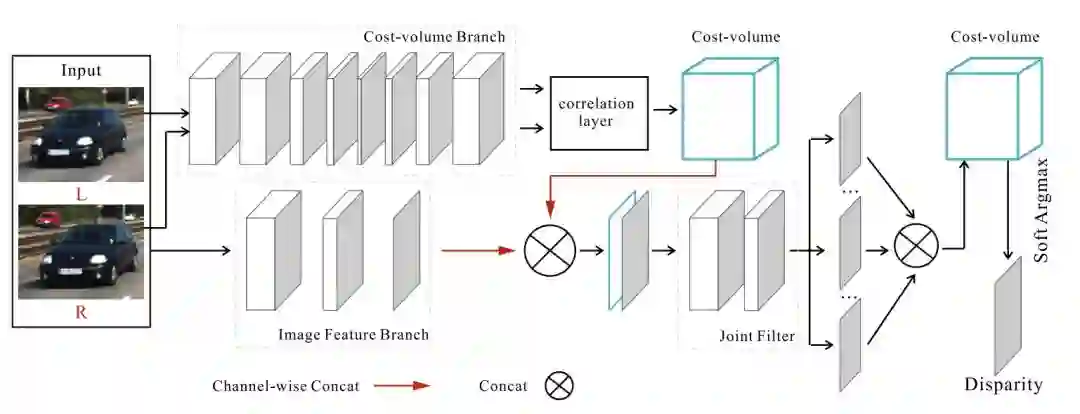
图2. 我们的立体匹配学习网络使用双目图像作为输入,并生成一个视差图。网络结构具有两个分支,其中第一个用来计算代价,第二个用来联合滤波。
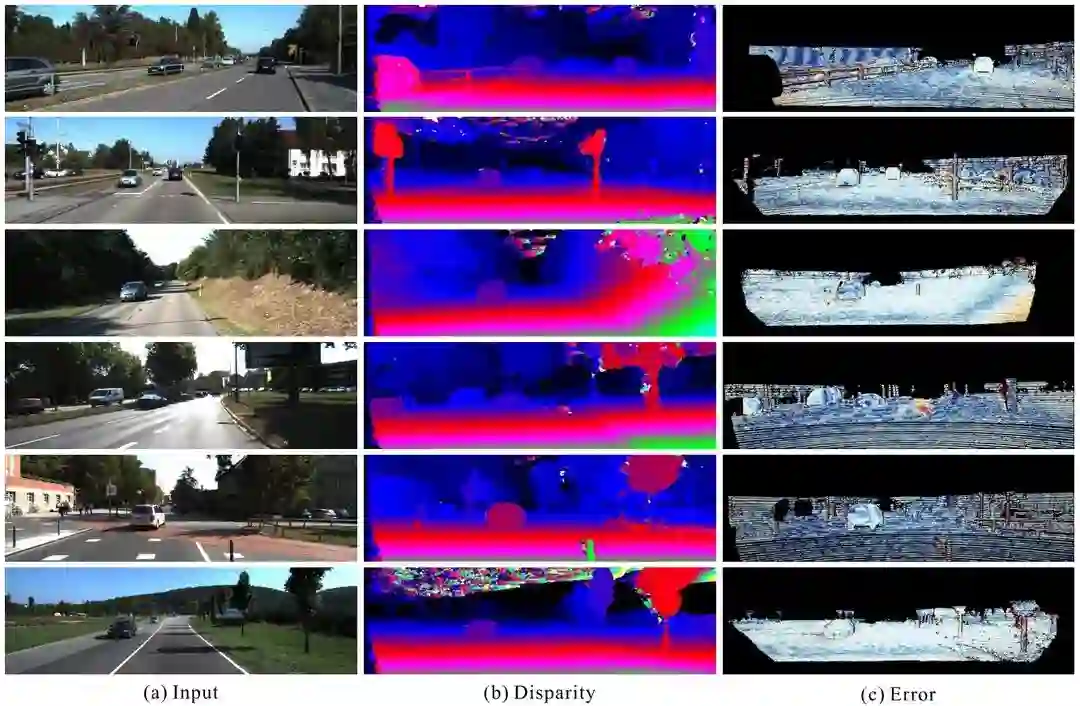
图3. 在KITTI 2015数据集上的一些结果。所有的结果均是直接由网络生成,没有经过任何的后处理。

Abstract
Convolutional neural networks showed the ability in stereo matching cost learning. Recent approaches learned parameters from public datasets that have ground truth disparity maps. Due to the difficulty of labeling ground truth depth, usable data for system training is rather limited, making it difficult to apply the system to real applications. In this paper, we present a framework for learning stereo matching costs without human supervision. Our method updates network parameters in an iterative manner. It starts with a randomly initialized network. Left-right check is adopted to guide the training. Suitable matching is then picked and used as training data in following iterations. Our system finally converges to a stable state and performs even comparably with other supervised methods.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com