【泡泡一分钟】一种有效的基于全局图像描述子的分布式视觉场景识别方法
标题:Efficient Decentralized Visual Place Recognition From Full-Image Descriptors
作者:Titus Cieslewski and Davide Scaramuzza
来源:International Symposium on Multi-Robot and Multi-Agent Systems, University of Southern California,2017
编译:王慧国
播音员:四姑娘
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

今天介绍的文章是“Efficient Decentralized Visual Place Recognition From Full-Image Descriptors”——一种有效的基于全局图像描述子的分布式视觉场景识别方法。
在非结构或者没有GPS信号的环境中,对于多机器人的状态估计来讲,多视觉机器人的SLAM是一种有效的方法。这个问题能够使用中心化的策略来解决,但有些时候则需要用分布式的办法。分布式的视觉场景识别已经成为分布式SLAM系统的重要一个环节。
通过让所有的机器人向所有的其他机器人发送查询来实现这一目标将占用大量的带宽,机器人社区已经探索了各种方法来减少带宽。在早先的工作中,我们提出了场景识别中词袋模型的分布式版本,通过分布式反向索引,对于N个机器人系统它能够减少N被的带宽需求。
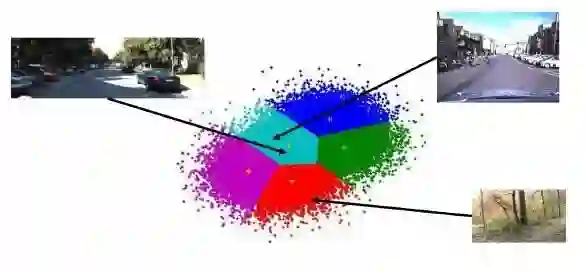
在这篇文章中,我们提出了一种基于全局图像描述子的分布式视觉场景识别方法。该方法包括将全局图像描述子空间聚类成几个聚类,并将每个聚类分配给一个机器人。因此,通过将每个场景查询发送给一个机器人就可以实现场景识别。我们通过与中心化实现的系统进行对比,并在Oxford Robotcar和KITTI数据集上评估,并探索性能与负载平衡之间的折衷。
【原文摘要】
Abstract—Visual multi-robot simultaneous localization and mapping (SLAM) is an effective way to provide state estimation to a group of robots that operate in an unstructured and GPS-denied environment. This is a problem that can be solved in a centralized way, but in some instances it can be desirable to solve it in a decentralized way. Decentralized visual place recognition, then, becomes a key component of a decentralized visual SLAM system. Achieving it by having all robots send queries to all other robots would use vast amounts of bandwidth, and diverse approaches have been explored by the robotics community to reduce that bandwidth. In previous work, we have proposed a decentralized version of bag-ofwords place recognition, which, by using a distributed inverted index, is able to reduce bandwidth requirements by a factor of n, the robot count. In this short paper, we instead propose a decentralized visual place recognition method that is based on full-image descriptors. The method consists in clustering the full-image descriptor space into several clusters and assigning each cluster to one robot. As a result, place recognition can be achieved by sending each place query to only one robot. We evaluate the performance of our new method versus a centralized implementation using the Oxford Robotcar and KITTI datasets and explore an inherent trade-off between performance and load balancing.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
回复关键字“EDVPRFID”,即可获取本文下载链接。

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com




