【泡泡一分钟】基于位姿图SLAM和三维环境中的运动规划的子地图的虚拟占据环境地图
每天一分钟,带你读遍机器人顶级会议文章
标题:Virtual Occupancy Grid Map for Submap-based Pose Graph SLAM and Planning in 3D Environments
作者:Bing-Jui Ho, Paloma Sodhi, Pedro Teixeira
来源:2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
编译:王丹
审核:颜青松,陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

本文提出了一种基于局部子映射构造全局可变形虚拟占用网格地图(VOG-map)的映射方法。这种表示允许姿态图SLAM系统通过回环检测来校正全局累积漂移,同时为了路径规划保持自由空间信息。我们演示了这种表示用于实现水下SLAM系统,其中机器人主动规划路径以产生精确的3D场景重建。在仿真实验和真实世界实验下我们评估了算法性能。我们的工作进一步增强了移动机器人主动绘制和探索非结构化三维环境的能力。
主要贡献是:(1)引入了虚拟就占据网格地图(VOG-map),它能够对自由空间和占用空间进行建模,并基于SLAM回环检测来校正全局地图漂移。(2)我们使用(1)实现了一个水下SLAM系统,该系统能主动规划路径以产生精确的3D场景重建。(3)我们在模拟和真实世界的实验下评估(2)。
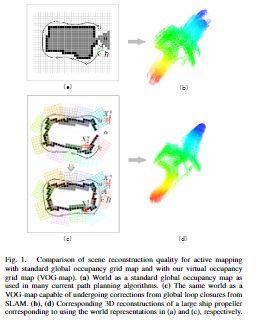
图1 与标准全局占据栅格地图以及我们的虚拟占据栅格地图(VOG-map)相比,活动地图场景重建的质量。(a)world作为标准全局占据栅格地图,用于当前许多路径规划算法。(c)与VOG-map相同的world,能够接受来自SLAM的闭环修正。(b),(d)分别对应于使用(a)和(c)中的world表示的对大型船舶螺旋桨进行相应的三维重建。
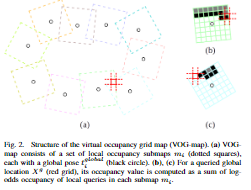
图2 虚拟占据栅格图(VOG-map)的结构。(a)VOG-map由一组局部占据子图mi(点阵)组成,每个子图具有全局偏序集全局i(黑圈)。(b),(c)对于查询的全局位置Xg(红色网格),其占用值被计算为每个子图中局部查询的对数奇数占用的总和。
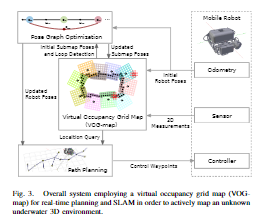
图3 采用虚拟占用网格地图(VOG-map)进行实时规划和SLAM,以主动绘制未知水下三维环境的总体系统。
图4 三维重构中的均方根误差。

Abstract
In this paper, we propose a mapping approach that constructs a globally deformable virtual occupancy grid map(VOG-map) based on local submaps. Such a representation allows pose graph SLAM systems to correct globally accumulated drift via loop closures while maintaining free space information for the purpose of path planning. We demonstrate use of such are presentation for implementing an underwater SLAM system in which the robot actively plans paths to generate accurate 3D scene reconstructions. We evaluate performance on simulated as well as real-world experiments. Our work furthers capabilities of mobile robots actively mapping and exploring unstructured,three dimensional environments
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com





