
题目: From Pixels to Buildings: End-to-end Probabilistic Deep Networks for Large-scale Semantic Mapping
简介:
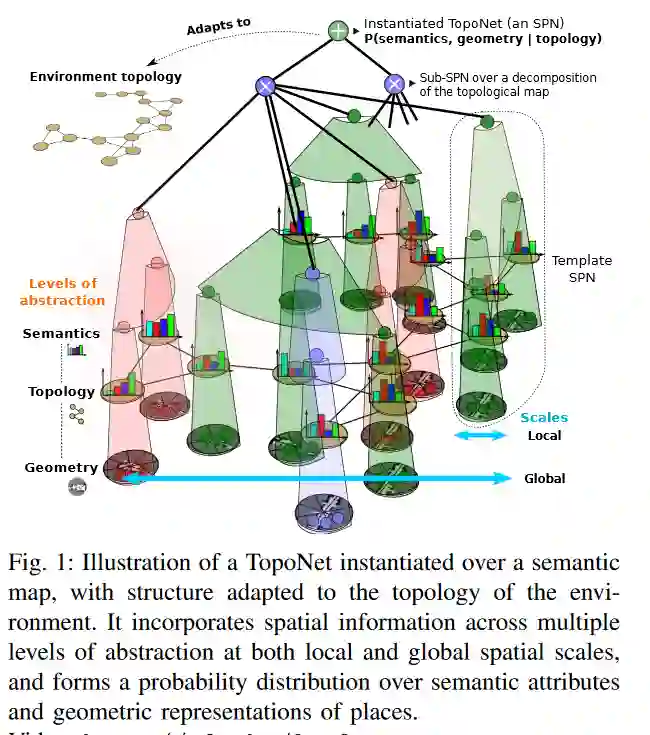
我们介绍了拓扑网,这是一种端到端的概率深度网络,用于对反映大规模环境拓扑结构的语义映射进行建模。TopoNets构建了一个跨越多个抽象层次和空间尺度的统一深度网络,从表示局部几何位置的像素到对建筑语义的高级描述。为此,拓扑网络利用以任意动态图表示的复杂空间关系。我们演示了如何使用TopoNets来执行端到端的语义映射,从部分感官观察和嘈杂的拓扑关系发现的机器人探索大型办公空间。由于它们的概率性质和生成特性,TopoNets将语义映射的问题扩展到了分类之外。我们证明了拓扑网络能够成功地对未知空间进行不确定推理,并检测出机器人未知的新奇的和不一致的环境配置。我们的TopoNets实现了实时的、可处理的和精确的推理,这使得这些新的深度模型成为移动机器人空间理解的一个有前景的、实用的解决方案。
作者:
Kaiyu Zheng是布朗大学的博士生,之前在华盛顿大学毕业,获得计算机科学的理学硕士和理学学士学位,辅修数学。目前的研究是解决机器人任务的大型POMDPs,从对象搜索开始。
成为VIP会员查看完整内容

相关内容
Arxiv
3+阅读 · 2018年3月4日
相关主题




相关VIP内容
相关资讯
相关论文
Arxiv
3+阅读 · 2018年3月4日