NeurIPS 2019 | 用于弱监督图像语义分割的新型损失函数

作者丨赵磊
学校丨北京林业大学硕士生
研究方向丨语义分割

背景
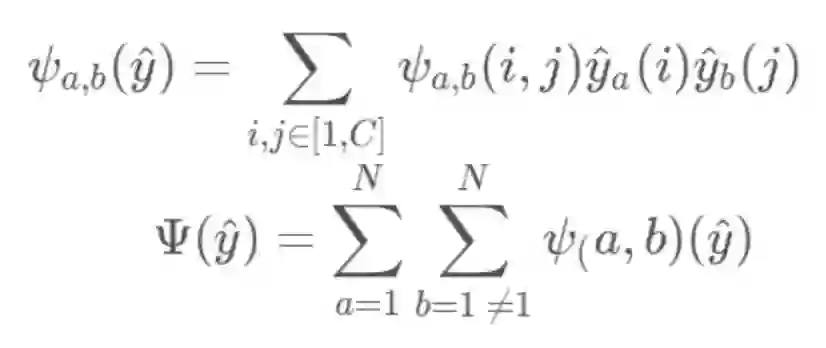
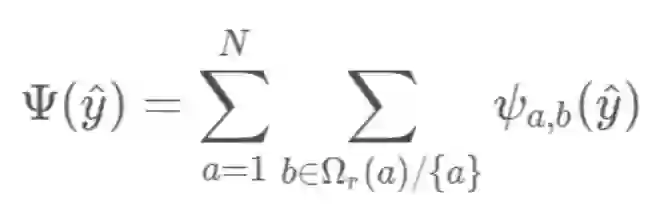
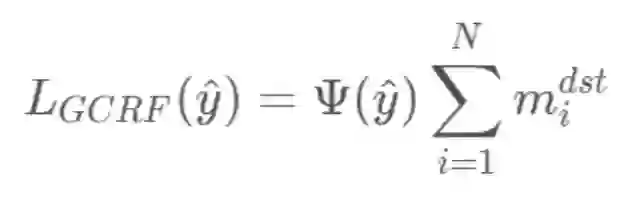
门控CRF损失
 ,
其中 y 是给定标签。
,
其中 y 是给定标签。
 ;
而弱监督方法中只有一部分像素
点带有标注,会形成一个带有不完整结果的分割图
;
而弱监督方法中只有一部分像素
点带有标注,会形成一个带有不完整结果的分割图 ,由于只有部分像素点有标
注,这个交叉熵损失通常被称为局部交叉熵损失(
partial cross-entropy
,
pCE)
。
,由于只有部分像素点有标
注,这个交叉熵损失通常被称为局部交叉熵损失(
partial cross-entropy
,
pCE)
。

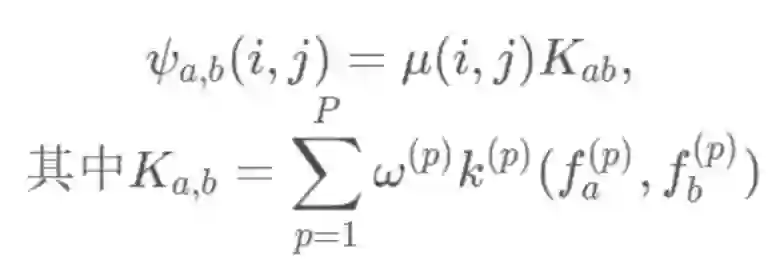

 ,即当该位置为 1,则可以用于为其他位置计算势,为 0 则不可以。
,即当该位置为 1,则可以用于为其他位置计算势,为 0 则不可以。
 ,值为 1 表示该像素点可以从其他位置的像素点接收能量,0 则不可以。
,值为 1 表示该像素点可以从其他位置的像素点接收能量,0 则不可以。

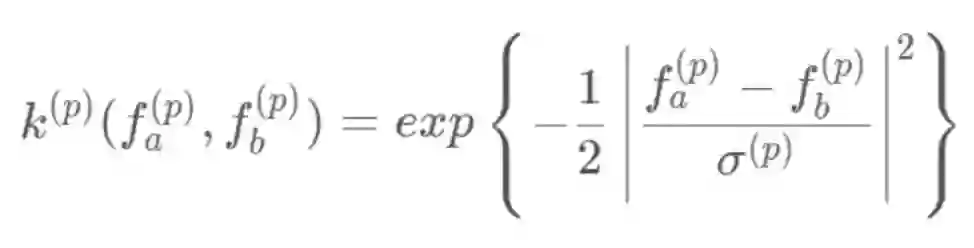
 ,即门控函数,其能够有选择地进行能量计算 {只有当 b 是有效的“源”位置且 a 是有效的“目标”位置,位置 b 对于位置 a 的能量才能够参与计算}。
,即门控函数,其能够有选择地进行能量计算 {只有当 b 是有效的“源”位置且 a 是有效的“目标”位置,位置 b 对于位置 a 的能量才能够参与计算}。


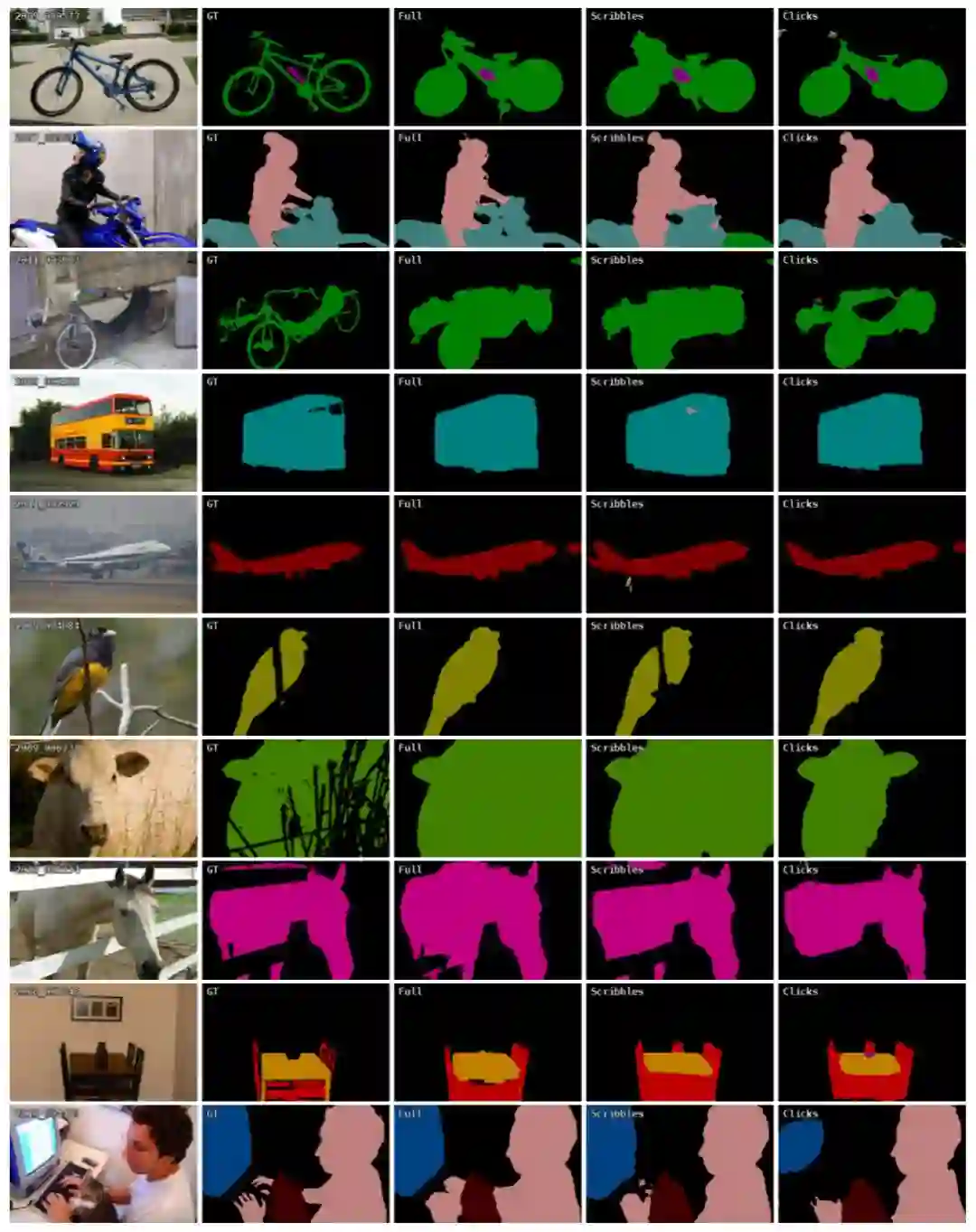
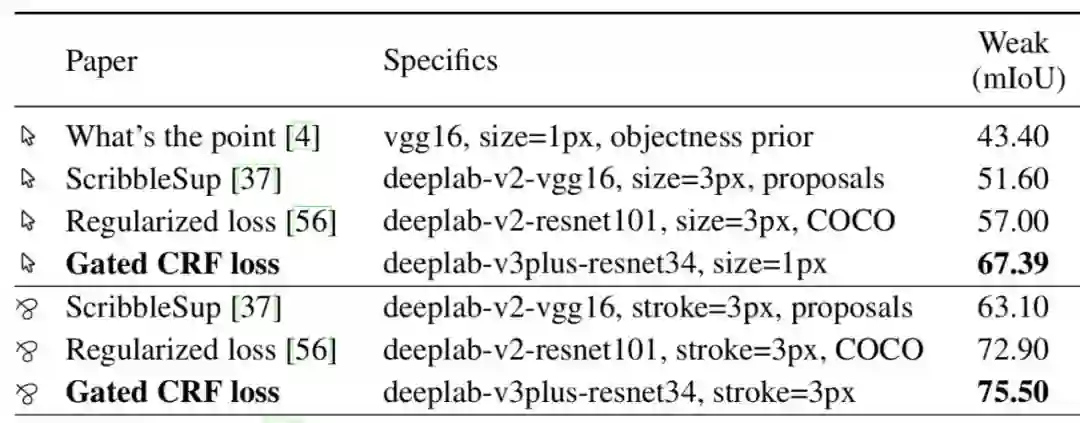
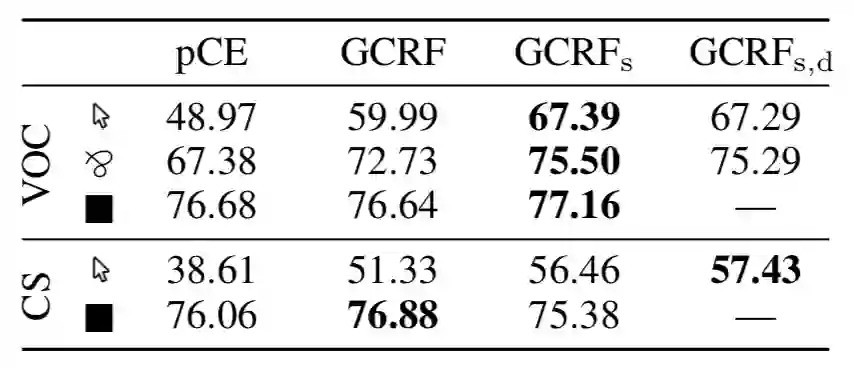
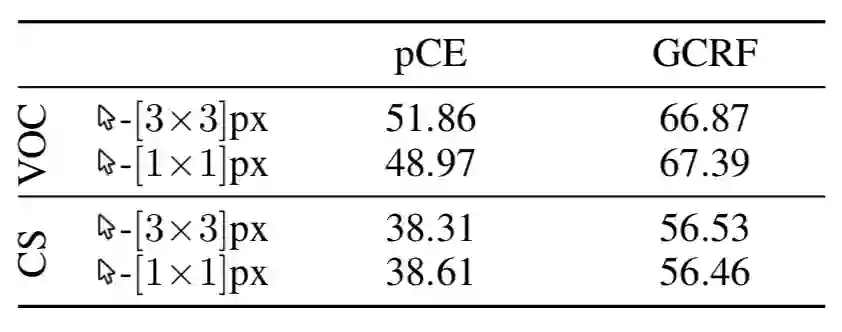
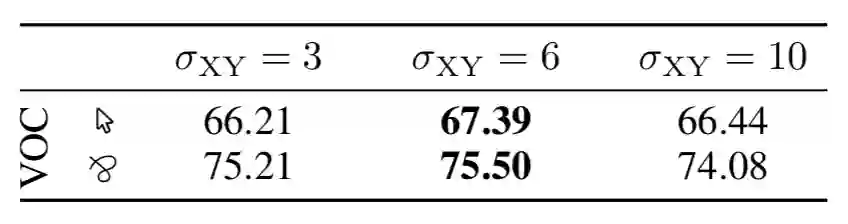
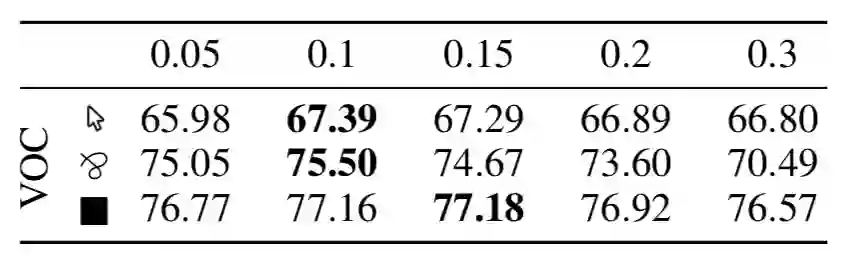
实验分析
总结

点击以下标题查看更多往期内容:

让你的论文被更多人看到
如何才能让更多的优质内容以更短路径到达读者群体,缩短读者寻找优质内容的成本呢?答案就是:你不认识的人。
总有一些你不认识的人,知道你想知道的东西。PaperWeekly 或许可以成为一座桥梁,促使不同背景、不同方向的学者和学术灵感相互碰撞,迸发出更多的可能性。
PaperWeekly 鼓励高校实验室或个人,在我们的平台上分享各类优质内容,可以是最新论文解读,也可以是学习心得或技术干货。我们的目的只有一个,让知识真正流动起来。
📝 来稿标准:
• 稿件确系个人原创作品,来稿需注明作者个人信息(姓名+学校/工作单位+学历/职位+研究方向)
• 如果文章并非首发,请在投稿时提醒并附上所有已发布链接
• PaperWeekly 默认每篇文章都是首发,均会添加“原创”标志
📬 投稿邮箱:
• 投稿邮箱:hr@paperweekly.site
• 所有文章配图,请单独在附件中发送
• 请留下即时联系方式(微信或手机),以便我们在编辑发布时和作者沟通
🔍
现在,在「知乎」也能找到我们了
进入知乎首页搜索「PaperWeekly」
点击「关注」订阅我们的专栏吧
关于PaperWeekly
PaperWeekly 是一个推荐、解读、讨论、报道人工智能前沿论文成果的学术平台。如果你研究或从事 AI 领域,欢迎在公众号后台点击「交流群」,小助手将把你带入 PaperWeekly 的交流群里。

▽ 点击 | 阅读原文 | 下载论文
登录查看更多
相关内容
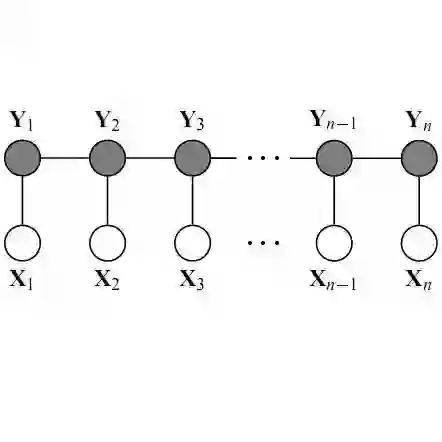
条件随机域(场)(conditional random fields,简称 CRF,或CRFs),是一种判别式概率模型,是随机场的一种,常用于标注或分析序列资料,如自然语言文字或是生物序列。
如同马尔可夫随机场,条件随机场为具有无向的图模型,图中的顶点代表随机变量,顶点间的连线代表随机变量间的相依关系,在条件随机场中,随机变量 Y 的分布为条件机率,给定的观察值则为随机变量 X。原则上,条件随机场的图模型布局是可以任意给定的,一般常用的布局是链结式的架构,链结式架构不论在训练(training)、推论(inference)、或是解码(decoding)上,都存在效率较高的算法可供演算。
Arxiv
11+阅读 · 2019年4月1日
Arxiv
6+阅读 · 2018年4月9日



相关VIP内容
相关资讯
相关论文
Arxiv
11+阅读 · 2019年4月1日
Arxiv
6+阅读 · 2018年4月9日