【泡泡点云时空】DeepMapping: 来自多重点云的无监督地图估计
泡泡点云时空,带你精读点云领域顶级会议文章
标题:DeepMapping: Unsupervised Map Estimation From Multiple Point Clouds
作者:Li Ding, Chen Feng
来源:CVPR-2019
编译:赵林
审核:吕佳俊
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

我们提出了一种新的配准框架—DeepMapping,它使用深度神经网络(DNNs)作为辅助功能,将多重点云从零开始对齐到一个全局一致的框架。我们使用DNNs来建模高度非凸映射过程,该过程传统上包括手工制作的数据关联、传感器姿态初始化和全局细化。我们的关键创新之处在于,使用适当定义好的无监督损失函数来训练这些DNNs,这相当于解决了基础的配准问题,但对ICP的要求实现良好初始化的依赖性较小。我们的框架包含两个DNNs:一个定位网络,它估计输入点云的位姿;一个地图网络,它通过估计全局坐标的占用情况来建模场景结构。这使得我们可以将配准问题转化为二值占用分类问题,然后利用基于梯度的优化方法进行有效地求解。我们进一步证明,通过在连续点云之间施加几何约束,DeepMapping可以很容易地扩展到对激光SLAM问题的求解上。我们同时在模拟数据集和真实数据集上进行了实验。定性和定量的实验比较表明,与现有技术相比,DeepMapping常常能够实现更健壮和更准确的多重点云全局配准。本文的代码已发布在Github上。地址如下:https://ai4ce.github.io/DeepMapping/
主要贡献
本文的主要贡献如下:
提出了点云配准框架——DeepMapping,该框架使用两个DNNs进行无监督的端到端训练,用来解决点云建图/配准问题。与传统的需要手工特性和数据关联的方法相比,这种方法更易于并行实现;
在不牺牲配准精度的前提下,利用神经网络和无监督损失,将该连续回归问题转化为二分类问题;
对本文提出的配准框架进行了实验,实验证明,与传统的方法相比,DeepMapping对姿态初始化的依赖性较小。
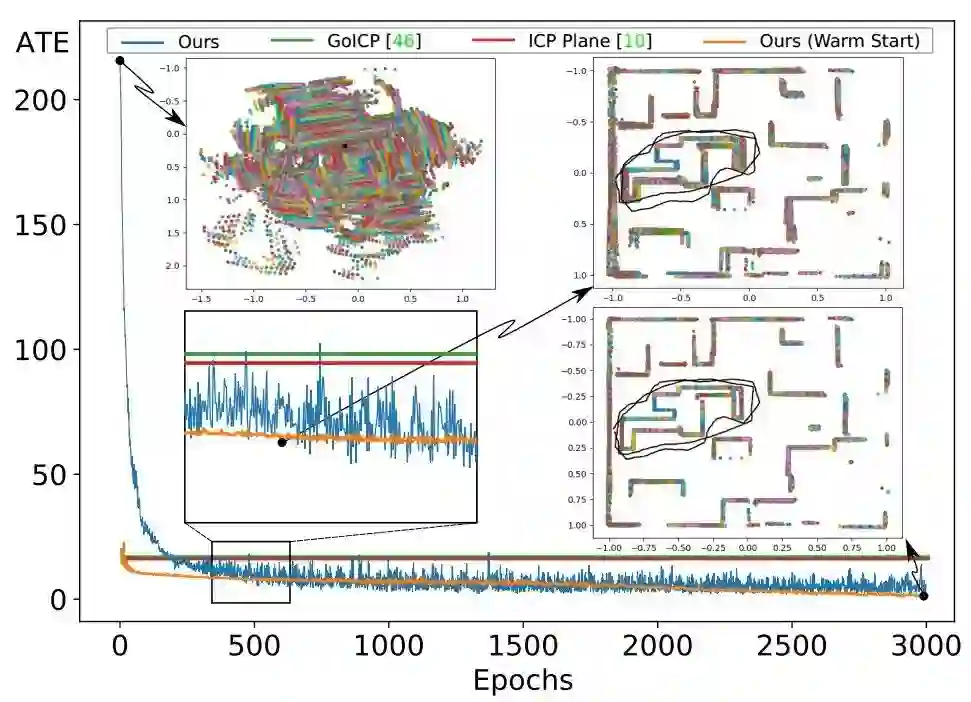
图1:与示例数据集中的其他基准相比,DeepMapping实现了更好的配准质量。
算法流程
网络架构:
L-Net:定位网络,其目标是在全局坐标系下估计传感器的位姿Ti。该网络由一个潜在特征提取模块和一个多层感知器(MLP)组成,后者输出传感器姿态Ti。
M-Net: 占据栅格地图网络,该网络是一个以全局空间中的一个位置坐标作为输入,并预测每个输入位置对应的占据概率的二元分类网络。
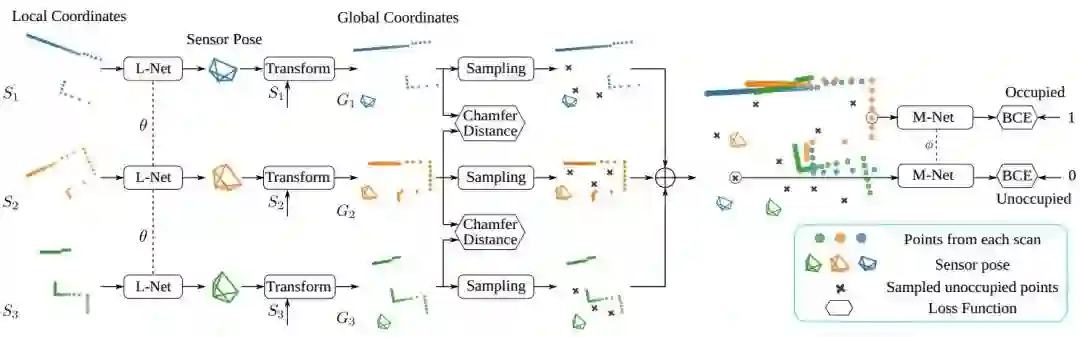
图2 DeepMapping的工作流程:点云以不同颜色显示。将每个输入点云都馈送到共享的L-Net中,以计算将输入映射到全局坐标的变换参数,在全局坐标中采样已占用的位置(彩色实心圆圈)和未占用的位置(灰色交叉标记)。M-Net预测了采样点的占用概率。全局占用损失函数是所有采样点的平均二元交叉熵(BCE)。通过积分连续激光扫描之间的倒角距离损失,DeepMapping能在允许的情况下处理时间信息。
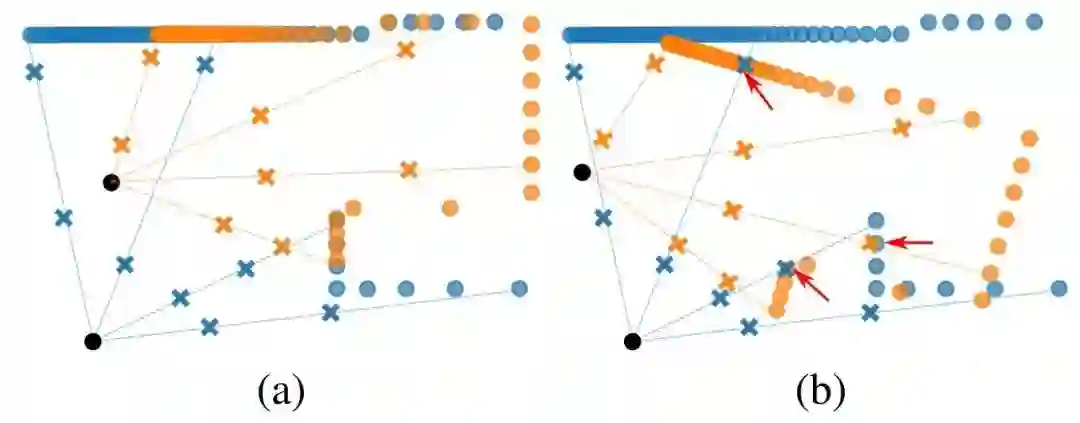
图3:采样方法和相斥的占用状态的图示。蓝色和橙色圆圈是全局坐标中的两个点云,交叉标记表示采样的未占用点。(a)和(b)分别显示正确对齐和未对齐的点云。(b)内的红色箭头突出显示占用情况相斥的各点。
主要实验结果
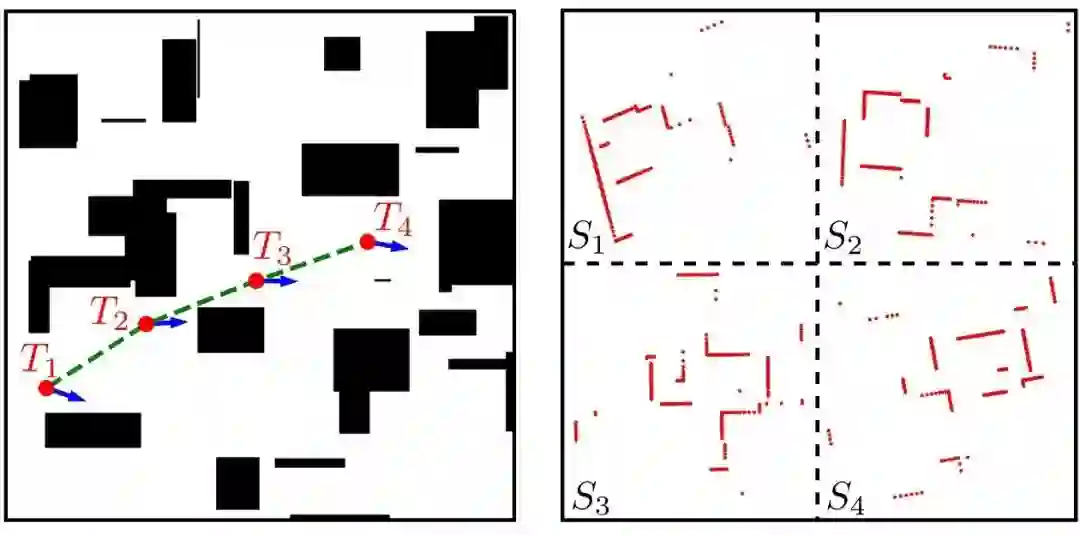
图4:图示为在时间分别为20,70,120,170捕获的四次激光扫描。左图:二值化图像显示尺寸大小为1024x1024的模拟环境。传感器位姿用红色圆圈和蓝色箭头显示。绿色虚线表示传感器的轨迹。右图:在对应的位姿下捕获的观测点云。
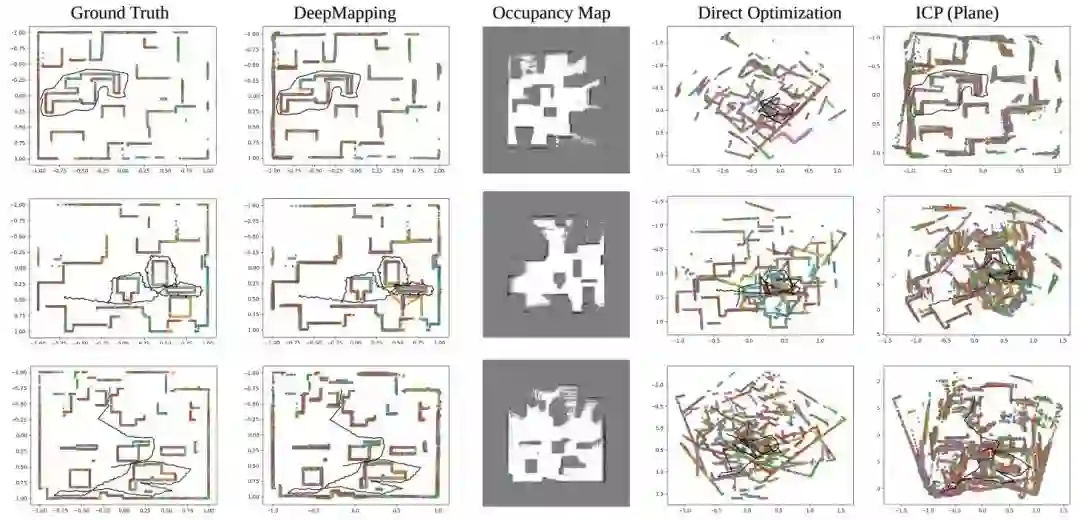
图5:二维模拟数据集的定性结果。黑色的线是传感器的轨迹。第三列显示了由M-Net估计的每个轨迹的占据栅格地图。黑色、白色和灰色像素分别显示已占用、未占用和未探索的位置。虽然每个轨迹的结果都是在任意坐标系下定义的,但我们将它们与地面真实坐标对齐以进行清晰的比较。更多可视化结果包含在论文的补充材料中。
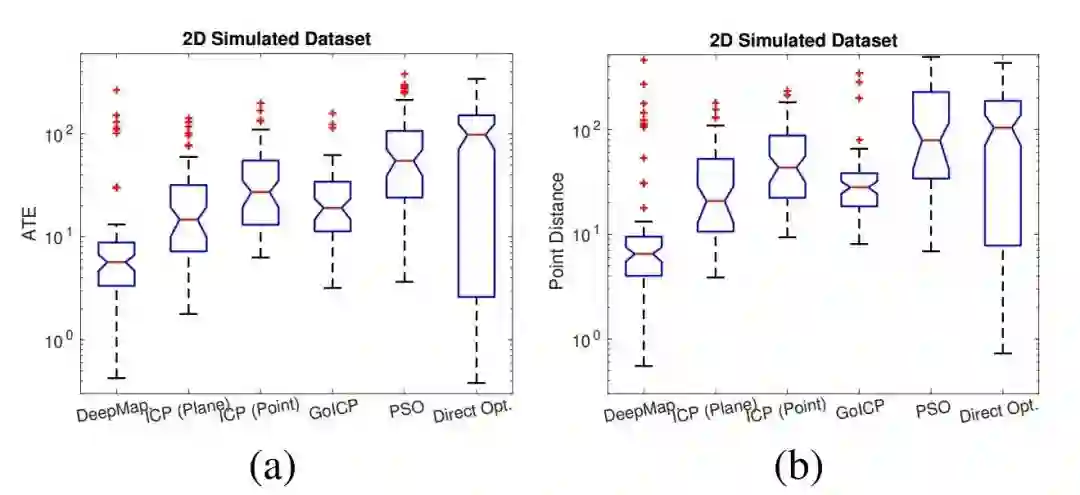
图6:在二维模拟数据集上绘制的ATE箱形图和点距离的箱形图。在每个框中,红线表示中值。框的顶部和底部蓝色边缘分别显示第一个(第25百分位)和第三个(第75百分位)四分位数。注意y轴的对数刻度。
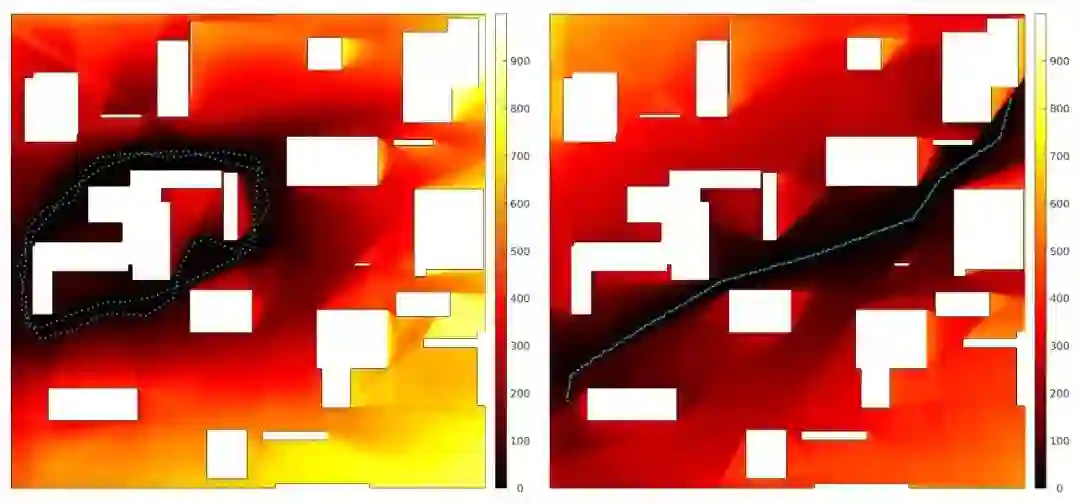
图7:两个L-Nets的重定位误差(黑色表示更好),青色点表示训练阶段使用的轨迹。
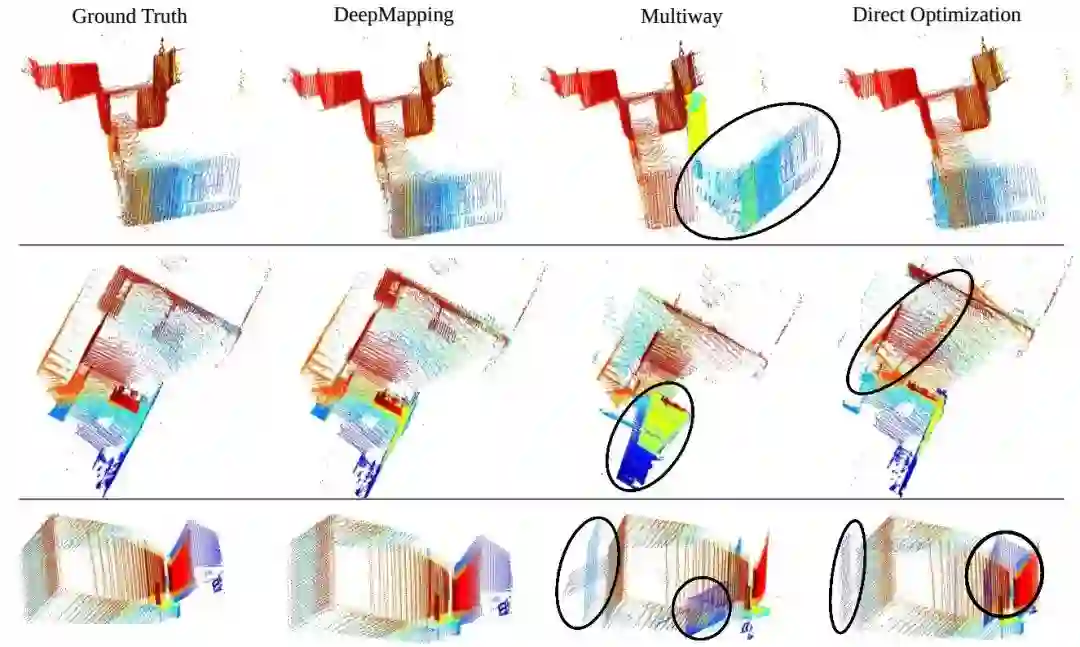
图8:在AVD数据集上测试了多重点云配准的定性结果。黑色椭圆突出显示了基线中未对齐的部分。每一种颜色代表一个点云。更多的可视化内容在论文的补充材料中。

Abstract
We propose DeepMapping, a novel registration framework using deep neural networks (DNNs) as auxiliary functions to align multiple point clouds from scratch to a globally consistent frame. We use DNNs to model the highly non-convex mapping process that traditionally involves hand-crafted data association, sensor pose initialization, and global refinement. Our key novelty is that training these DNNs with properly defined unsupervised losses is equivalent to solving the underlying registration problem, but less sensitive to good initialization than ICP. Our framework contains two DNNs: a localization network that estimates the poses for input point clouds, and a map network that models the scene structure by estimating the occupancy status of global coordinates. This allows us to convert the registration problem to a binary occupancy classification, which can be solved efficiently using gradientbased optimization. We further show that DeepMapping can be readily extended to address the problem of Lidar SLAM by imposing geometric constraints between consecutive point clouds. Experiments are conducted on both simulated and real datasets. Qualitative and quantitative comparisons demonstrate that DeepMapping often enables more robust and accurate global registration of multiple point clouds than existing techniques. Our code is available at https://ai4ce.github.io/DeepMapping
如果你对本文感兴趣,请点击阅读原文下载完整文章,如想查看更多文章请关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com

