
Continual Stereo Matching of Continuous Driving Scenes with Growing Architecture
Chenghao Zhang, Kun Tian, Bin Fan, Gaofeng Meng, Zhaoxiang Zhang, Chunhong Pan
深度双目模型在驾驶场景中取得了最先进的性能,但在未见过的场景中进行测试时性能严重下降。尽管最近的工作通过不断的在线适应缩小了这一性能差距,但这种设置需要在部署时不断更新梯度,并且无法避免灾难性的遗忘。为了应对这些挑战,我们建议执行连续双目匹配,其中模型的任务是 1) 不断学习新场景,2) 克服忘记先前学习的场景,以及 3) 在没有在线梯度更新的情况下连续预测视差。我们通过引入可重用架构增长 (RAG) 框架来实现这一目标。RAG 利用特定任务的神经单元搜索和架构增长来持续学习新场景。在增长过程中,它可以通过重用之前的神经单元来保持高可重用性,同时获得良好的性能。还引入了一个名为 Scene Router 的模块,以在推理时自适应地选择特定于场景的架构路径。实验结果表明,我们的方法在各种具有挑战性的驾驶场景中都优于最先进的方法。
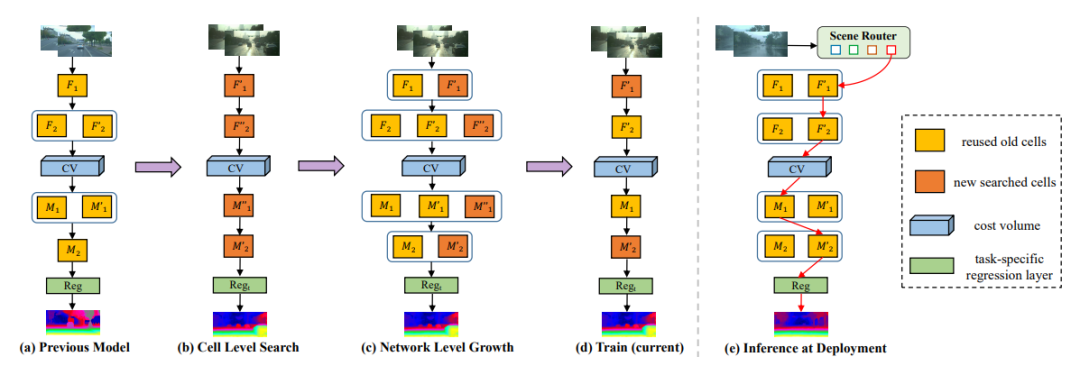
RAG模型结构示意
成为VIP会员查看完整内容
相关内容

专知会员服务
18+阅读 · 2022年3月19日
专知会员服务
49+阅读 · 2020年2月15日
Arxiv
0+阅读 · 2022年4月15日
Arxiv
13+阅读 · 2018年1月6日


相关VIP内容
专知会员服务
18+阅读 · 2022年3月19日
专知会员服务
49+阅读 · 2020年2月15日
相关资讯
相关论文
Arxiv
0+阅读 · 2022年4月15日
Arxiv
13+阅读 · 2018年1月6日