
美国国防部高级研究计划局(DARPA)的 "进攻性蜂群战术"(OFFensive Swam-Enabled Tactics)计划的目标是从有限的发射区发射 250 架无人机和地面车辆,这是一项艰巨的挑战。蜂群无人系统主要是多旋翼平台,可以高效地大规模发射。每次实地演习都会部署更大的飞行器群。虽然每次实地演练都会增加发射区的空间面积,但考虑到蜂群规模的不断扩大以及飞行器相关的 GPS 误差,每辆飞行器的相对空间并不一定会增加。不过,安全部署和执行任务是可以预期的。同时,为了实现任务目标,需要通过减少阻碍车辆完成战术任务的拥堵情况,最大限度地提高蜂群的工作效率。在最终实地演练前进行的拥堵分析侧重于调整各种约束条件,以便在不降低安全性的情况下优化蜂群的部署。在实地演练期间,收集的数据可用于分析单个车辆受阻的次数和持续时间对所造成拥堵的影响。实地演练结束后,还利用任务规划进行了其他分析,以验证使用模拟分析拥堵情况的有效性。
美国国防部高级研究计划局(DARPA)的 "OFFSET"(OFFensive Swam-Enabled Tactics)计划旨在在复杂的城市环境中启用超大型异构无人驾驶空中和地面系统集群(DARPA,nd)。随着蜂群规模的扩大,DARPA 故意限制发射区的大小和分配的部署时间,以 "鼓励 "团队解决蜂群部署的后勤难题。OFFSET 计划的 "聚合蜂群战术的指挥与控制"(CCAST)团队的蜂群架构旨在使单个操作员能够部署和监控由多达 250 辆无人飞行器组成的蜂群,以执行各种任务(Clark 等人,2021 年)。
在 "OFFSET "计划的实施过程中,随着实地演习在不同的美国防部联合武装集体训练设施(CACTF)进行,蜂群的规模也在不断扩大。在部署由异构地面和多旋翼飞行器组成的硬件群时,每个 CACTF 都面临着不同的挑战。CACTF 的大小、形状及其结构(如建筑物、灯柱、电线、路标和路沿石)、指定发射/着陆区的大小以及飞行器群的大小和组成都会影响飞行器的分布,并增加发射、飞行途中和着陆时发生冲突的可能性。换句话说,也就是拥堵。挑战在于确定如何有效地部署蜂群,同时最大限度地减少拥堵和导航路径规划冲突。更具体地说,当大量依靠 GPS 定位的飞行器部署到一个小区域(称为发射区)并返回时,就会发生定位误差较大的冲突。这种拥堵会对蜂群的性能产生负面影响,延迟或中断任务计划,并导致飞行器(尤其是航空飞行器)耗尽电池,缩短其可部署的任务时间。
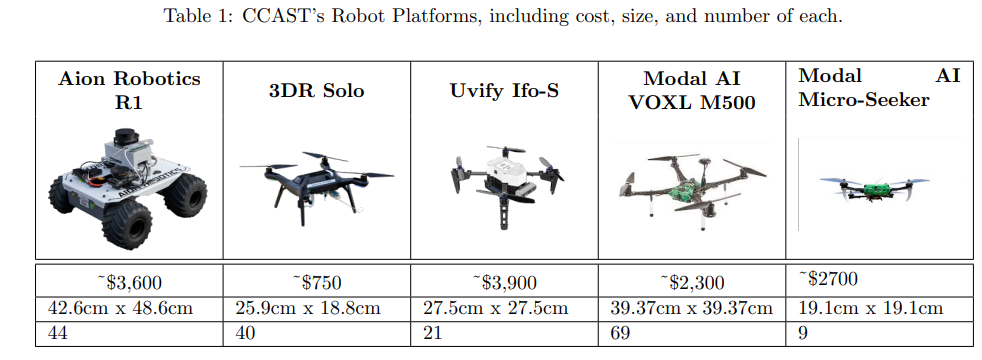
CCAST 团队本打算为最后的演习提供至少 250 个硬件的机群,但由于无法控制的情况,CCAST 的整个机群由 183 个飞行器组成: 44 个地面机器人 (UGV) 和 139 个多旋翼飞行器 (UAV)。异构蜂群由相对较小、成本较低(如最贵的为 3,900 美元)的商用平台组成,见表 1,其中一些平台还增加了必要的传感器和处理能力。与更大型、更昂贵的机器人相比,这些飞行器虽然能力很强,但也有其局限性,但权衡利弊,还是使用价格低廉的平台来扩大蜂群的规模。
DARPA 故意限制了发射区的大小,对同时部署所有飞行器的能力提出了挑战。虽然 UGV 可以探测并避开部署在发射区的 UAV,但 UGV 在 UAV 中穿行并不可取。所有飞行器都能通过全球定位系统进行自我定位,但由于飞行器体积较小,全球定位系统的误差可达 5 米,因此操作程序要求发射区内的所有飞行器之间保持 5 米的距离。此外,飞行器可能会被地面或空中的其他飞行器阻挡,或无法规划可穿越的导航路径。受阻的无人飞行器在重新规划时需要悬停,这会消耗更多电能,缩短部署时间。最后,CACTF 的建筑环境会产生障碍物和堵塞点,造成车辆拥堵。这些阻塞或拥堵可能发生在飞行途中、任务目标附近(例如,接近建筑物进行监视),也可能发生在起飞或返回发射(RTL)时的发射区上空。鉴于这些制约因素,我们的目标是确定如何在受限的发射区域内优化部署更大的异构蜂群,以实现实地演习的任务优先级。要实现这一目标,需要对发射区的飞行器配置、安全协议变化(如减少平台之间的 "安全 "距离)和任务计划修改进行研究。
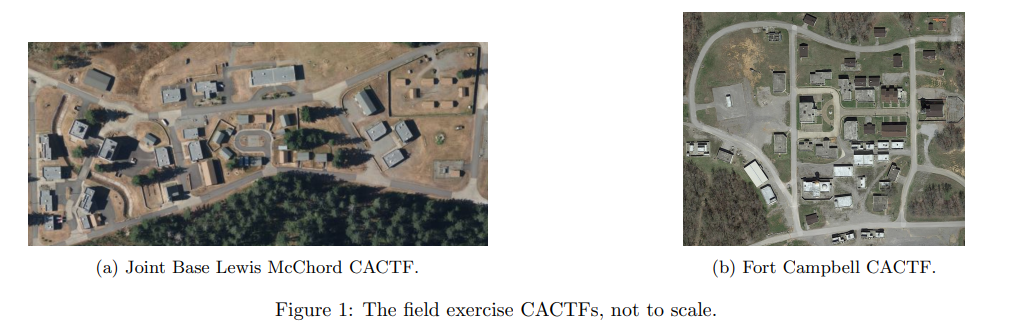
对两个 CACTF 进行了分析。图 1a 所示的刘易斯-麦克乔德联合基地莱斯奇镇是第 4 次实地演习(FX)的地点,最初被考虑用于第 6 次实地演习。最终,坎贝尔堡的卡西迪 CACTF(如图 1b 所示)被选为 FX6 的地点。本手稿对实际任务和模拟任务进行了分析,模拟任务的结果是 FX6 实际结果的基线。潜在的拥堵对无人机的飞行时间及其对实现任务方案目标的贡献影响更大;因此,CCAST 蜂群的无人机是本分析的主要重点。
首先概述了 CCAST 蜂群系统,然后回顾了相关的拥堵缓解文献。提供了 FX6 之前两个 CACTF 的拥堵分析结果。FX6 之后的后续分析调查了 FX6 期间发生的拥堵情况,以及使用相同任务计划进行模拟试验得出的拥堵情况。CCAST 的多保真蜂群模拟器用于生成结果。提供了每项分析的实验方法和相应结果。讨论深入探讨了拥堵对任务进度和缓解方法的影响。
"聚合蜂群战术的指挥与控制"(CCAST)蜂群系统架构
CCAST 蜂群架构有四个主要组成部分:飞行器、任务规划器、蜂群指挥官界面(I3)和蜂群调度器。任务规划器在任务部署前使用,可将战术组成任务计划。这些战术可能需要具有特定能力或有效载荷的飞行器,并可能包含战术间的排序依赖关系。

