【蜂群无人机控制关键技术】《基于深度学习进行无线电信号和协议分类以自动发现波形漏洞》2022最新102页报告,美国空军研究实验室
引言
-
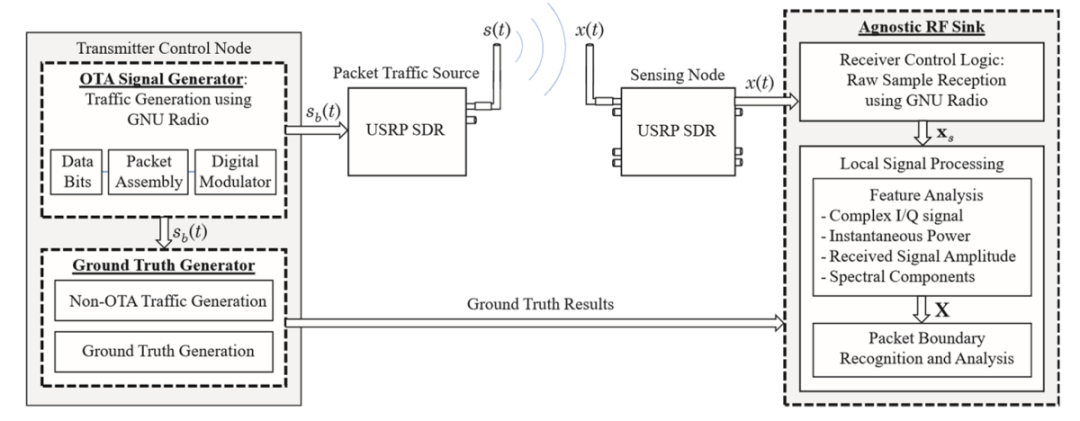
协议无关传感。射频(RF)传感是设计具有高频谱效率和环境感知适应能力的智能和安全无线网络的一项关键技术。然而,现有的传感技术只能从射频信号中提取有限的信息,或者假设射频信号是由某些已知的协议产生的。因此,如果采用专有协议或加密方法,或在受到意外干扰等错误的环境中,它们的应用是有限的。为了应对这一挑战,在这个项目中,我们研究了协议无关的跨层传感,其目的是从原始射频样本中提取高层协议信息,而不需要任何关于协议的先验知识。首先,我们以数据包边界识别(PBR)为例,提出了一个对空中(OTA)射频信号进行协议无关的感知框架。该框架由三个主要部分组成。OTA信号发生器,不可知的射频汇,和地面实况发生器。然后,我们使用通用软件无线电外设(USRP)软件定义的无线电(SDR)开发了一个软件定义的测试平台,在不可知的射频汇中实现了11种统计算法。这些算法包括距离相关、Kullback-Leibler分歧和交叉功率谱密度等。最后,我们通过生成一个OTA射频样本的数据集,考虑各种传输参数,包括调制类型、传输距离和数据包长度,测试这些统计算法在PBR中的有效性。结果发现,现有的统计算法中没有一种能达到持续的高PBR率。对PBR率影响最大的参数包括调制类型和数据包大小,而令人惊讶的是,对于大多数调制方案,PBR率几乎不受传输距离和接收信号强度的影响。
-
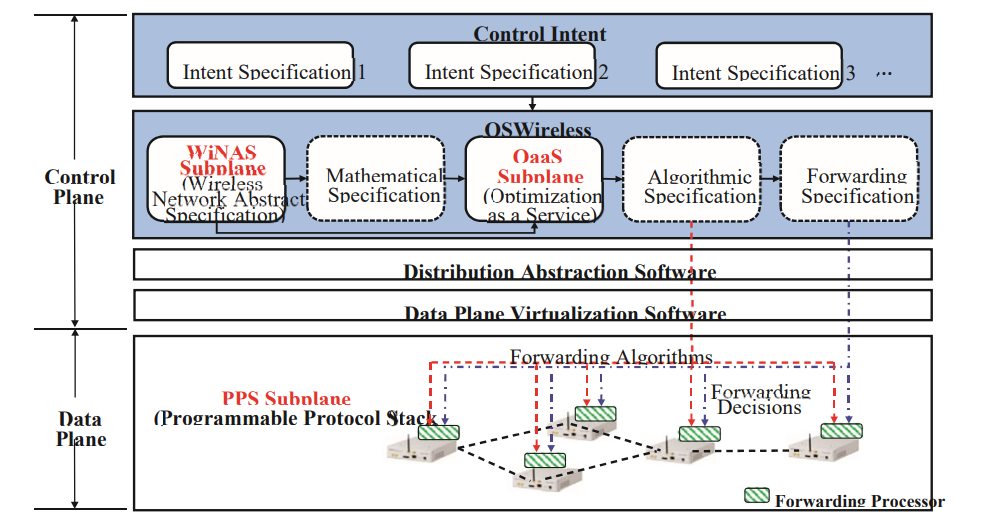
OSWireless。在目前的无线工程实践中,为了优化无线网络,工程师们通常需要同时处理网络建模、算法和协议设计,以及它们在分布式边缘节点上的实现。这个过程很繁琐,也很容易出错。在本报告中,我们试图通过设计OSWireless来应对这一挑战,OSWireless是一个用于优化软件定义的无线网络的新控制平面。OSWireless的核心是四个控制平面功能的虚拟化,包括意图、数学、算法和转发规范,然后将它们作为一种服务提供给网络工程师。为此,我们为控制平面设计了两个新的子平面。无线网络抽象规范(WiNAS)子平面和优化即服务(OaaS)子平面。前者将使用高级应用编程接口(API)定义的意图规范转换为相应的数学规范,而后者则自动生成可操作的(可能是分布式的)算法规范。我们以OSWireless为原型,并将其部署在NeXT这个新开发的软件定义的实验测试平台上,展示了OSWireless的自动控制程序生成能力,以及考虑到各种网络控制问题而生成的程序的优化性。通过开发OSWireless并将其开源,我们希望能加速研究,以实现未来的零接触软件定义的无线网络,并降低管理的复杂性。
-
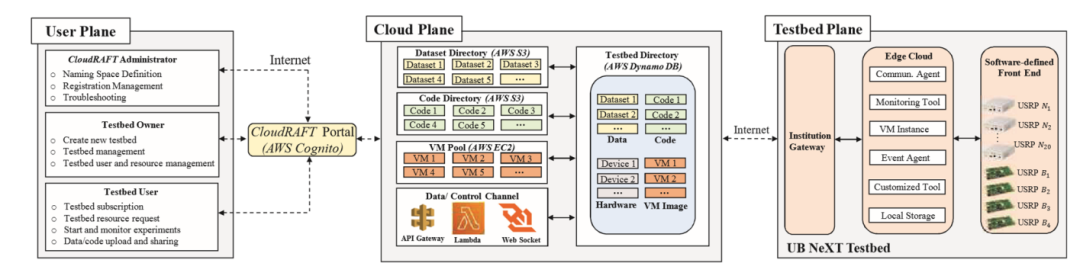
CloudRAFT。在这个项目中,我们探索新的技术,可以为移动网络实现开放的远程实验。我们首先提出了一个名为CloudRAFT的基于云的框架,在此基础上,允许实验者通过公共云Amazon Web Services(AWS)远程访问和控制实验资源,并通过云分享所产生的数据和代码。然后,我们讨论了CloudRAFT的启用技术,包括亚马逊无服务器服务、基于虚拟网络计算(VNC)的远程命令行和基于Websocket的实时通信等。最后,我们展示了这些技术在实现远程访问UB NeXT方面的应用,UB NeXT是水牛城大学为无线移动网络建模、优化和部署而开发的一个软件定义的测试平台。这项工作验证了通过远程公共云访问、控制和共享无线测试平台的可行性。
-
FlyBeam。这项工作旨在设计具有分布式波束成形能力的高数据率蜂群无人机(UAV)网络。主要的挑战是,蜂群无人机网络的波束成形增益受到无人机的飞行高度、它们的运动和由此产生的间歇性链路阻塞,以及单个无人机的信道状态信息(CSI)可用性的高度影响。为了应对这一挑战,我们提出了FlyBeam,一个基于学习的框架,用于群集无人机网络的联合飞行和波束成形控制。我们首先提出了一个控制问题的数学表述,目标是通过联合控制无人机的飞行和分布式波束成形,使蜂群无人机网络的吞吐量最大化。然后,我们设计了一种基于回声状态网络学习和在线强化学习相结合的分布式解决算法。前者通过共同考虑未知的阻塞动态和影响波束成形增益的其他因素,在在线测量的基础上,对单个无人机的效用函数进行近似。后者被用来指导FlyBeam的开发和探索。FlyBeam的有效性通过广泛的模拟活动进行了评估。结果表明,FlyBeam可以实现显著的(高达450%)波束成形增益。我们还研究了阻塞物和无人机飞行高度对波束成形增益的影响。结果发现,在蜂群无人机网络中,FlyBeam可以在更密集的阻挡下实现更高(而不是更低)的波束成形增益,这一点有些令人惊讶。 -
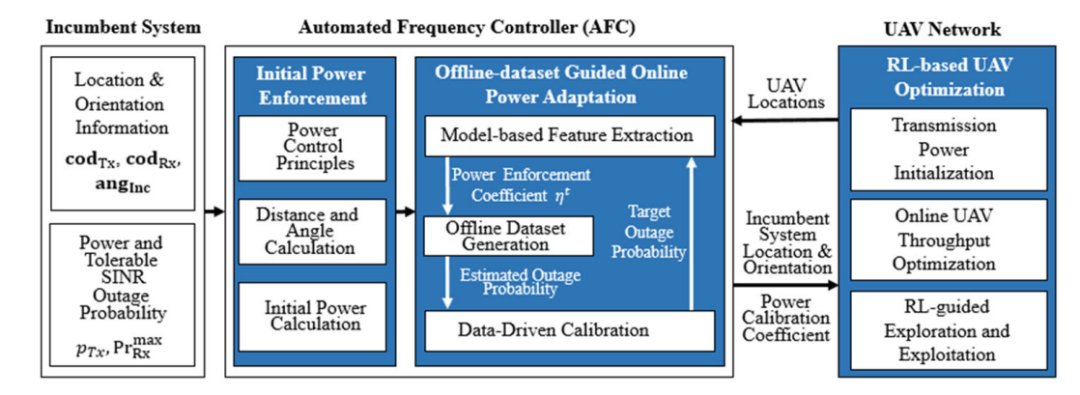
SwarmShare。在这个项目中,我们提出了SwarmShare,一个用于6GHz频段的蜂群无人机网络的抗移动性频谱共享框架。我们首先提出了SwarmShare问题的数学表述,其目标是在现有系统的干扰约束下,通过联合控制无人机的飞行和发射功率以及它们与地面用户的联系,使无人机网络的频谱效率最大化。我们发现,没有封闭式的数学模型可以用来描述从无人机到现存系统的总干扰的统计行为。然后,我们提出了一个数据驱动的三阶段频谱共享方法,包括初始功率执行,离线数据集指导的在线功率适应,以及基于强化学习的无人机优化。我们通过广泛的模拟活动验证了SwarmShare的有效性。结果表明,基于SwarmShare,无人机对现存系统的总干扰可以有效地控制在目标水平以下,而不需要实时的跨系统信道状态信息。在没有精确的无人机位置信息的共存网络中,SwarmShare的移动弹性也得到了验证。
-
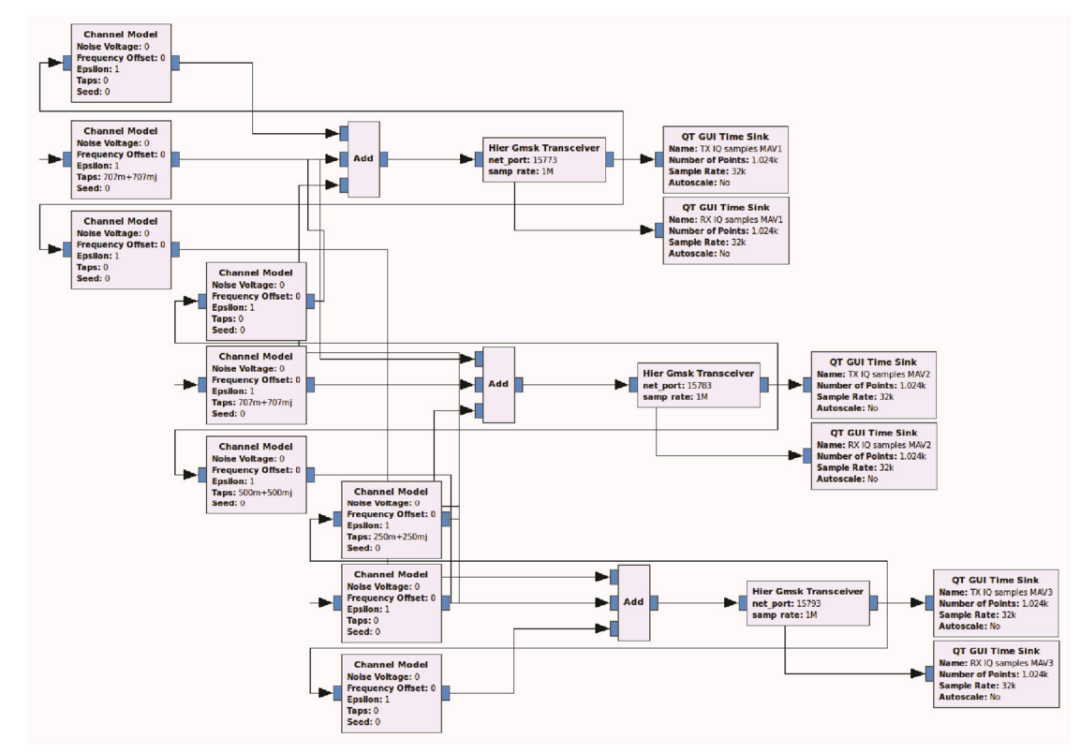
RF-SITL。RF-SITL是一个用GNU Radio实现的软件在环(SITL)IQ保真软件定义的信道模拟器。在这个项目中,我们与GE航空合作,将RF-SITL与他们的硬件在环仿真环境结合起来,包括三个M-100飞行控制器,用于模拟无人机,在AFSIM仿真框架中作为独立的代理。该集成在四个逐渐复杂的AFSIM场景中得到了验证,证明了:1: 1)两个附近的无人机之间的成功通信;2)两个遥远的无人机之间的失败通信;3)通过三个中继无人机的多跳通信;以及4)与干扰者的多跳通信,干扰者破坏了中继之间的通信。
便捷下载,请关注专知人工智能公众号(点击上方关注)
点击“发消息” 回复 “DW” 就可以获取《【蜂群无人机控制关键技术】《基于深度学习进行无线电信号和协议分类以自动发现波形漏洞》2022最新102页报告,美国空军研究实验室》专知下载链接



登录查看更多
相关内容

Arxiv
0+阅读 · 2023年2月13日
相关VIP内容
相关资讯
相关论文
Arxiv
0+阅读 · 2023年2月13日