
在本文中,我们介绍了一种基于新型蜂群移动模型 CROMM-MS(Chaotic Rössler Mobility Model for Multi-Swarms)的监控系统,用于早期探测来自禁区的逃逸者。CROMM-MS 设计用于控制由空中、地面和海洋无人飞行器组成的异构多蜂群的轨迹,具有早期探测优先和成功率高等重要特性。我们提出了一种新的竞争性协同进化遗传算法(CompCGA),利用捕食者-猎物方法优化飞行器参数和护航者的规避能力。我们的研究结果表明,CROMM-MS 不仅适用于监视任务,而且其结果与最先进的方法相比具有竞争力。
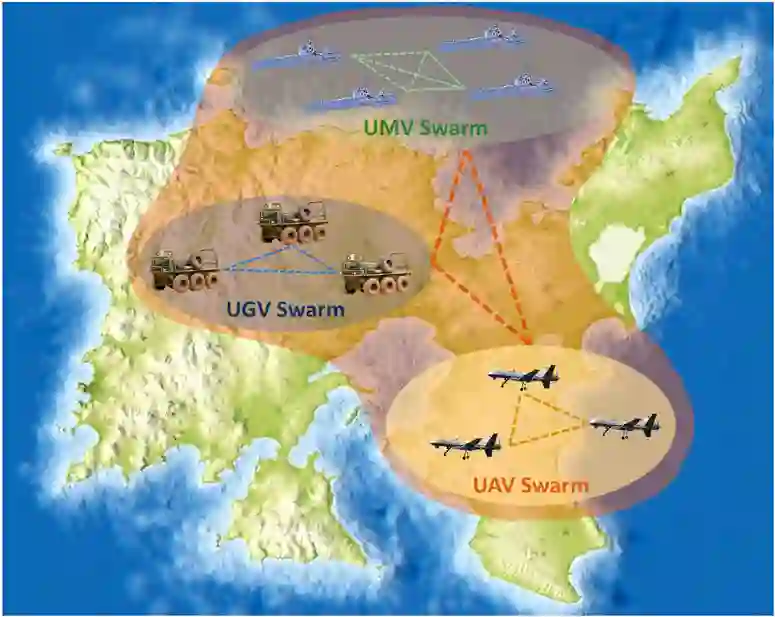
图 1. HUNTED 项目建议的蜂群间合作
使用不同类型的飞行器组成飞行群是一种很有前景的策略(Girma 等人,2020 年),它可以利用每个成员的能力,同时最大限度地减少其局限性。这些异构蜂群以社会昆虫的集体行为为基础,通过协作实现共同目标(Jeong 等人,2019 年),同时避开禁飞区、延长电池寿命或抵御恶劣天气。
如今,无人驾驶飞行器(UAV)(也称为无人机)已被广泛应用于许多领域(McNeal,2016)。在监控场景中(Brust 等人,2017 年),无人机可以利用其摄像头以相对较高的速度探索不同区域,具有出色的通信能力(Batista da Silva 等人,2017 年)。另一方面,无人飞行器的飞行时间较短,不能携带较大的有效载荷,遇到强风时静止不动也是个大问题。
无人地面飞行器(UGV)能够在各种地形上工作,与人类共享空间,在避开障碍物的同时搜索目标(Brust 和 Strimbu,2015 年)。UGV 是与无人机联合使用的良好候选者,可在不同地形特征下互为补充(Stolfi 等人,2020c)。虽然 UGV 的速度比 UAV 慢,通信范围也有限(视线、障碍物等),但它们具有更高的自主性,经常用于支持 UAV,提供移动充电站和任务目标之间的运输(Waslander,2013 年)。
无人水面飞行器(USV),包括无人海洋飞行器(UMV),已被提议作为未来海军部队的重要组成部分(Yan 等人,2010 年),以执行反水雷、海上安全和海上拦截行动支持等任务。它们被认为能提高现有的海军能力,减少作战时间和成本(Costanzi 等人,2020 年)。
机器人必须执行危险任务,如监视、巡逻或搜索水雷,在为机器人计算轨迹时,不可预知性是一个基本特征。基于混沌系统的移动模型具有这种所需的不可预测性(Iba 和 Shimonishi,2011 年),只对初始条件和实现方式敏感,实现方式可以通过软件在模拟器中使用(Rosalie 等人,2018 年),也可以作为机器人电子设备的一部分来实现,其特点是从多滚动吸引子中获得的真正随机比特发生器,为无人机提供航点(Volos 等人,2012 年)。
我们的建议包括一个新颖的多蜂群监视系统(图 1),其中无人机、UGV 和 UMV 相互协作,以实现对来自禁区的逃逸者的早期探测。为此,我们引入了 CROMM(Chaotic Rössler Mobility Model,混沌罗斯勒移动模型)的扩展,该模型最初是为同质车辆和区域覆盖而设计的,现在则用于异质多蜂群和监视场景中的逃逸者。我们的目标是利用每类车辆的最佳特征,取得比同质解决方案更好的结果。本文的主要贡献如下
1.一种名为 CROMM-MS(Chaotic Rössler Mobility Model for Multi-Swarms)的新移动模型,用于控制无人飞行器的轨迹,目的是最大限度地及早发现逃逸者。
2.采用捕食者--猎物的方法来训练和改进这一监视系统。
3.竞争进化遗传算法(CompGA),专门设计用于优化飞行器参数和改进护航者,使其成为有效的评估者。
本文的其余部分安排如下。在下一节中,我们回顾了与我们的工作相关的技术现状。第 3 节介绍了我们的方法。第 4 节是实验结果。最后,第 5 节是讨论和未来工作。
