
本文介绍了自主地面车辆(AGV)在越野和恶劣环境条件下进行障碍物探测和规避(ODOA)的综合研究结果。这项研究包括对AGV在雨、灰尘和可变形地形等挑战性条件下运行的真实和模拟测试。在模拟中实现了一种分析环境对车辆每个子系统(感知、规划、控制)的影响的新方法,并用于评估规划和感知算法的多种选择。这项工作是在公开可用的自主性堆栈上进行的最完整和最系统的测试活动,并将促进AGV在未来工作中的测试策略的发展。这项工作的主要贡献是为越野AGV开发了一个免费和开源的自主软件堆栈,一种对AGV系统进行定量评估的方法,并将模拟和物理测试结合到一个综合测试方法中。这项工作展示了如何利用模拟来测量在物理测试中无法测量的AGV性能的各个方面,使人们对自主堆栈的功能有更多的了解。
引言
虽然自动驾驶或自动驾驶车辆的能力越来越强,近年来也得到了广泛的研究[Peterson和Glancy,2018],但很少有人试图系统地量化来自灰尘、雨水和软土等来源的环境诱发的错误对这些车辆性能的影响。虽然这些车辆在这些环境条件下的挣扎已被很好地记录下来,从质量上看[Stock, 2018],但对这些影响的定量评估相对较少。
过去在定量误差测量方面的工作倾向于直接关注传感器数据或整体系统级性能。例如,已经有一些研究量化了雨或雪等现象对激光雷达传感器性能的影响[Rasshofer等人,2011]。同样,也有一些关于灰尘对激光雷达影响的实验室研究[Goodin e t al., 2013]。系统级的分析集中在平均速度或行驶距离等高级指标上[Durst等人,2017]。
虽然传感器层面或系统层面的误差研究有价值,但也需要了解误差如何通过自主子系统链传播。在雨天条件下运行的激光雷达传感器的错误是如何影响目标云、从目标云得出的导航图以及通过这些地图计划的行动的?是否有一种雨量可以使生成的路径和地图不受明显影响,以及在什么情况下,误差会开始在计划的行程中显现?回答这些问题对于自动驾驶汽车向消费者市场过渡至关重要。
从系统上测量环境引起的传感器误差和系统级性能之间的关系的主要困难是难以控制环境误差的因素。涉及这些因素的物理测试在后勤上是困难的,而且对投入的变量不确定。在灰尘、雨水或软土等条件下进行可重复的、受控的实验是不现实的,也是昂贵的。相比之下,基于物理学的模拟提供了一种方法来系统地研究这些现象对自主车辆性能的影响[Goodin等人,2017]。为了解决这些局限性,本研究开发了一种方法,使用仿真,研究错误通过AGV的子系统传播。这些测试通过与真实车辆在硬土和软土上的物理测试进行比较来验证。
在接下来的章节中,对该领域的相关工作进行了回顾(第2节),然后在第3节对这项多年研究的方法和途径进行了总结。接下来,详细介绍了这项工作中研究的车辆平台、传感器和自主性(第4节)。第5节介绍了密西西比州立大学自主车辆模拟器(MAVS),它是这项工作的一个关键推动因素。第6节介绍了本工作所研究的测试场景和指标,第7节展示和讨论了实验结果。第8节提出了一些最后的结论。
方法
这项工作的一个目标是利用模拟来测量系统级性能指标与规划和感知算法的子系统级指标的相关性。通过定义系统级和子系统级的指标,并使用模拟器来测量完美的基本事实,可以定量地测量错误在系统中的传播。此外,通过比较多种感知和规划算法,有可能区分出对自主系统的一般性影响和对某些传感器和算法的特殊影响。
为了进行基于场景的测试,选择了障碍物探测和规避(ODOA)测试作为本工作中测试的基线能力。ODOA是任何自主或半自主系统的一项关键能力[Oroko和Nyakoe, 2012]。由于这项工作的重点是研究广义的自主系统,所以选择了直线ODOA,因为它的简单性和对几乎所有自主系统的适用性。
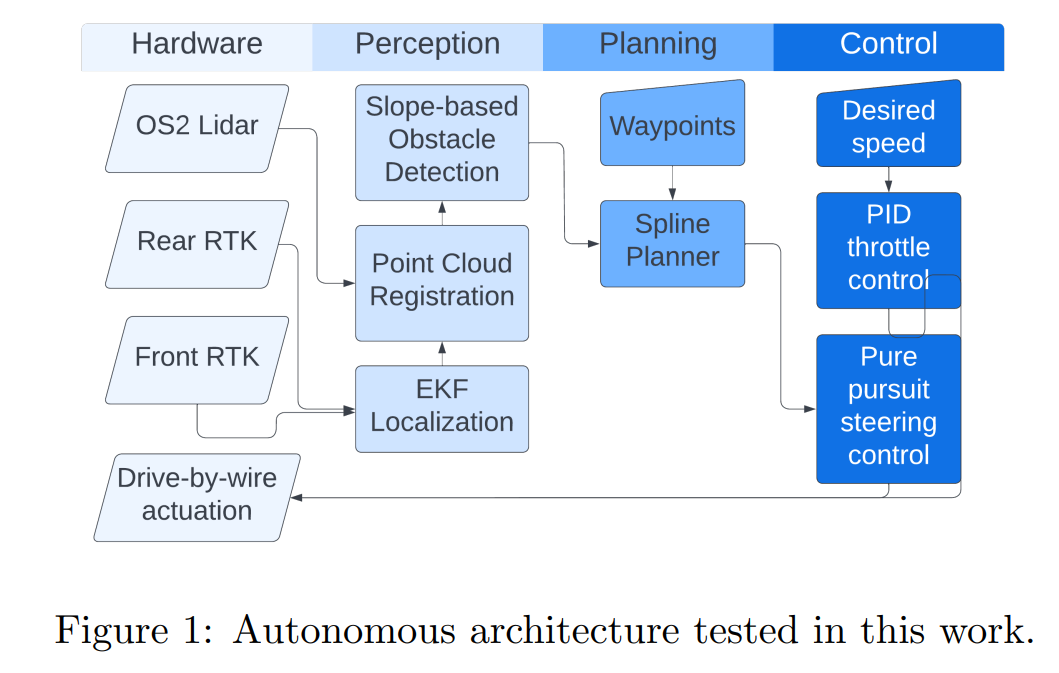
本文的研究分三个阶段进行。在第一阶段,最初的自主架构被设计、建造,并在模拟中与MAVS进行测试。使用ROS[Quigley等人,2009]对算法和模拟进行了整合。在规划和控制算法保持不变的情况下,对三种不同的感知算法进行了模拟研究。第一阶段还为系统级性能和子系统级性能制定了适当的性能指标。性能指标将在第6.1.2节进一步详细讨论。
项目的第二阶段集中在路径规划上。感知和控制保持不变,并对三种不同的规划算法进行了研究。第1阶段的指标也被用于第2阶段。与第一阶段一样,第二阶段完全在模拟中完成。
最后,在第三阶段,第1-2阶段在模拟中开发的自主性堆栈在一个真实的机器人车辆上实施。使用前几个阶段开发的相同的测试场景和指标,自主机器人在真实世界的实验和MAVS的模拟实验中都进行了测试。在真实世界的实验中,自主性堆栈得到了完善,该实验是在硬土和软土上进行的。第三阶段提供了对软土对A GV性能的影响的洞察力,并作为对第一和第二阶段进行的模拟实验的验证工作。

