自动驾驶高精度定位如何在复杂环境进行
来源 | DataFun&小马智行

通过陀螺输出的角速度信息积分得到姿态信息
通过姿态信息对加速度计输出的比力进行转换,由载体坐标系得到导航坐标系
进行重力计算,有害加速度、地球自转角速度等补偿计算
由加速度信息积分得到速度与位置

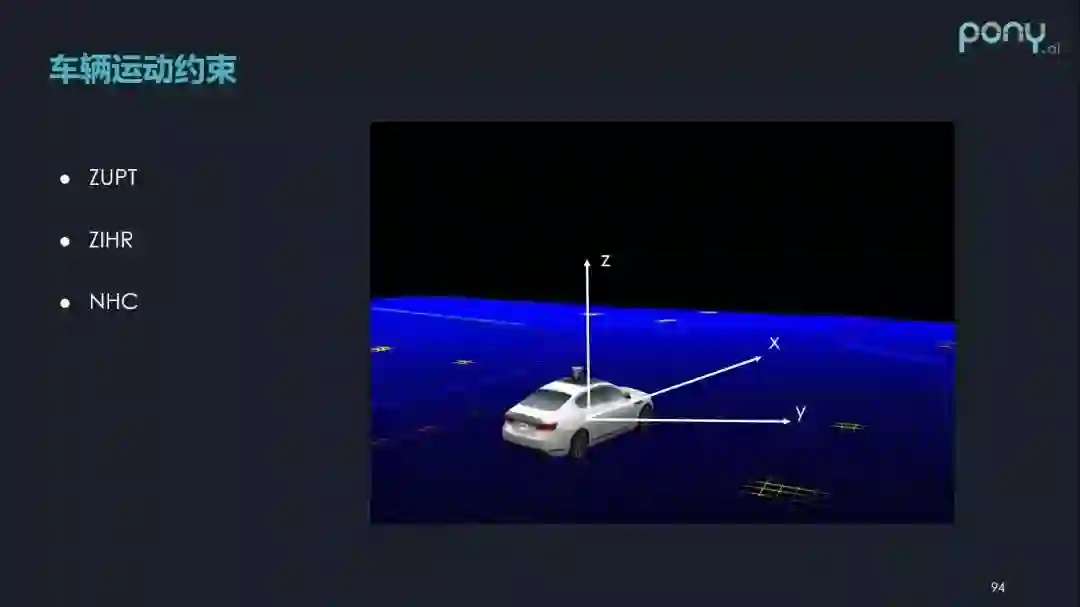
ZUPT/ZIHR/NHC,车辆运动约束部分
INS Alignment,惯性导航初始对准部分
Integrated,组合部分
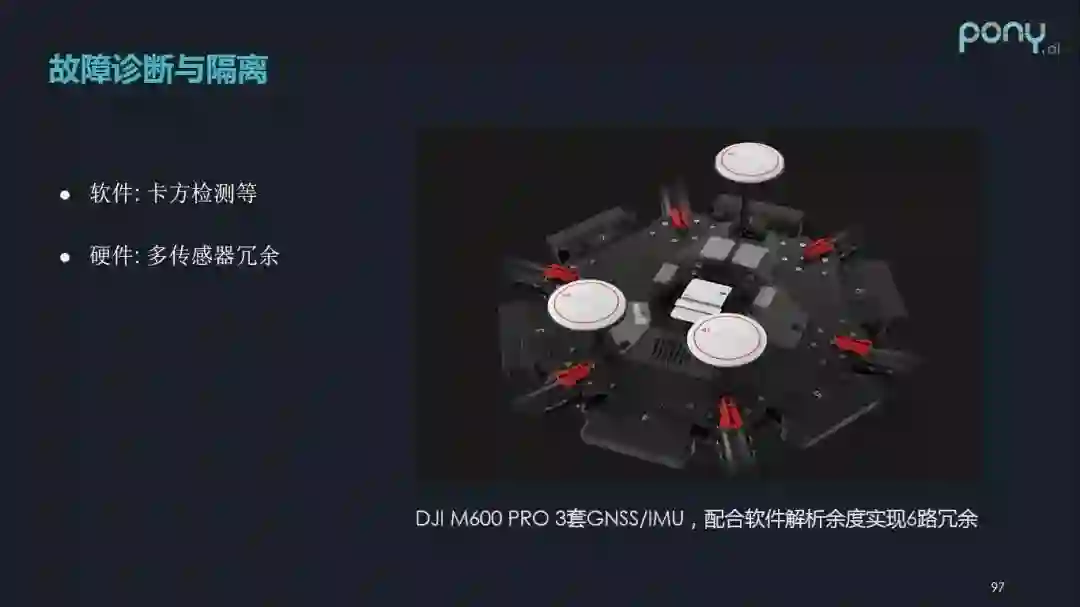
FDI,故障检测与隔离部分



MIT自动驾驶公开课系列课程分享
第一课【PPT+视频分享】:
Self-Driving Cars State-of-the-Art 2019(58页)
第二课【PPT+视频分享】:
Deep Leraning Behind the Wheel 2019(44页)

登录查看更多
相关内容

Arxiv
5+阅读 · 2018年4月25日




相关VIP内容
相关资讯
相关论文
Arxiv
5+阅读 · 2018年4月25日