创新和技术发展在科学的突破中一直发挥着重要作用。在过去的几十年里,无人水下航行器(UUV)的使用已经彻底改变了水生探索。UUV可以部署在人类无法到达的深度和环境中,并且可以收集到其他方式无法获得的数据。
近年来,人们对重新开放欧洲各地的废弃矿区的兴趣越来越大,这些矿区可能含有目前急需的原材料,其开发将减少欧洲对外部资源的依赖。最近一项关于欧洲废弃矿场的调查收集了关于30000个矿场的数据,其中有8000多个矿场被淹没。本论文为UNEXMIN项目框架内开发的创新解决方案做出了贡献,该项目旨在探索这些被淹没的地点,其中设计了一个新型水下平台系统,名为UX-1。UX1机器人需要在未知矿井隧道的三维网络中完全自主航行,因为不可能有任何通信,并收集各种地球科学数据。开发这个打算在挑战性环境中执行的新型平台,需要对其软件和硬件模块采取创新设计方法。
本论文的主要研究目标是设计、实现和验证UX-1水下机器人的自主引导系统。该机器人新颖的机械设计及其独特的机载科学仪器代表了该平台的具体特征。这些仪器与潜水器本身的运动的协调,满足每一种类型的传感器的科学样品捕获的严格位置要求,必须由平台的引导系统来保证。由于这些原因,UX-1的导向系统的设计和实施构成了一个独特的研究挑战。
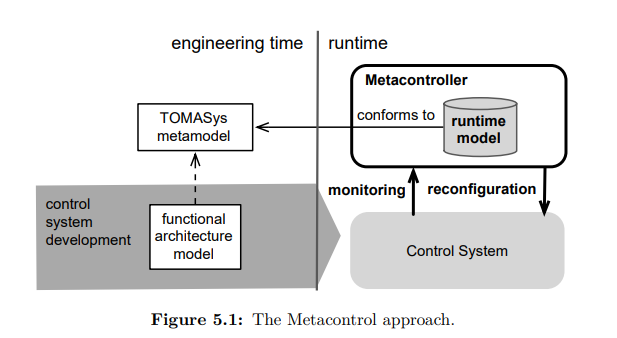
此外,为了确保长期的自主性,需要有足够程度的弹性,以便在受到意外事件干扰时保持和恢复系统的运行功能。为此,我们开发了一种先进的基于知识的自我意识技术,名为元控制。元控制器的设计是为了通过提高机器人的容错能力来增加其自主性。一个自我诊断模块被用来确定机器人的状态,一个决策模块被用来根据之前的诊断结果选择整个机器人系统的最佳重新配置以实现最佳功能。
所提出的解决方案在复杂的情况下使用模拟、软件在环(SIL)和硬件在环(HIL)方法进行实验验证,旨在以越来越高的保真度重现矿井隧道环境中的导航。代表最高保真度的HIL实验要求将真实的硬件和软件模块,包括我们的制导系统,与部分模拟的环境读数相结合。实验是在一个水池中进行的,其中与定位有关的真实读数被用于导航和控制目的,而测绘传感器的读数被绕过,以便复制不同的矿井隧道结构。在这些测试中获得的结果证明了制导系统的有效性及其与机器人其他系统的适当整合,并验证了UX-1平台在淹没的矿山环境中执行复杂任务的能力。
提纲
本论文分为七章,第一章介绍了论文的动机、问题陈述和目标,以及方法。论文的其余部分组织如下。
第二章介绍了机器人学的背景,机器人的分类,并回顾了水下航行器领域的技术现状,重点介绍了UUVs。此外,还介绍了自主系统,以及自主水平(LOA)和技术准备水平(TRLs)的定义。
第三章介绍了水下探雷机器人UX-1,它被用作开发我们的引导系统的平台。解释了对机器人设计的要求和限制,详细介绍了机器人的机械设计以及运动系统。此外,还解释了UX-1的硬件组件和它的传感器,以及它的软件结构。
第四章介绍了制导系统。首先,介绍了水下机器人的路径规划和任务控制的技术现状。然后,解释了制导系统,以及它的子系统,即任务规划器、行动执行器、轨迹发生器。最后,对几个路径规划器进行了基准测试和讨论。
第五章介绍了为实现容错操作而开发的元控制器。首先,介绍了容错和自我意识方面的技术现状。第二,介绍了一般的元控制框架和TOMASys元模型的扩展。第三,解释了使用TOMASys的UX-1机器人的本体建模。最后,讨论了所提解决方案的好处和局限性。
第六章介绍了用于测试和验证制导系统的实验装置。解释了软件在环(SIL)和HIL范式,以及使用的虚拟环境。然后,详细介绍了用于制导系统验证的实验。
第七章包括结论和未来工作。