
多目标跟踪(MOT)是军事防御应用中态势分析的重要组成部分。随着无人机系统(UAS)的使用越来越多,对空中监视的MOT方法的需求量也越大。MOT在UAS中的应用提出了特定的挑战,例如移动传感器、改变缩放级别、动态背景、光照变化、遮挡和小物体。
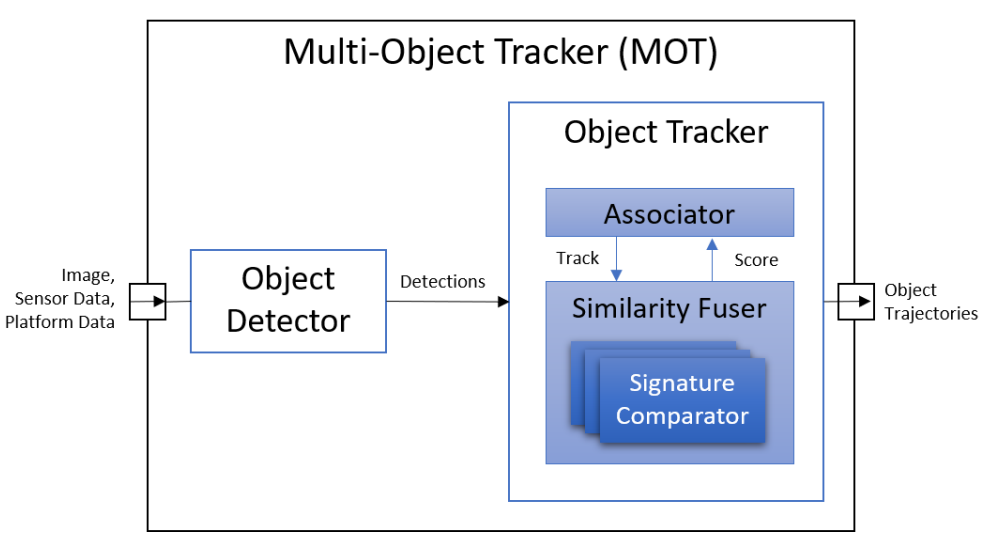
美国洛克希德·马丁的AI中心提出了一个强大的对象跟踪架构,旨在适应实时情况下的噪声。提出了一种称为深度扩展卡尔曼滤波器(DeepEKF)的运动学预测模型,其中使用sequence-to-sequence架构来预测潜在空间中的实体轨迹。DeepEKF利用一个学习过的图像嵌入以及一个训练有素的注意力机制来加权图像中区域的重要性,以预测未来状态。对于视觉评分,使用不同的相似性度量来计算基于实体外观的距离,包括使用Siamese网络预训练的卷积神经网络(CNN)编码器。评估实验结果表明此方法在MHT框架内结合了运动学和视觉模型的评分结构,提高了性能,尤其是在实体运动不可预测或数据呈现具有显着差距的帧的边缘情况下.
成为VIP会员查看完整内容
相关内容

专知会员服务
234+阅读 · 2022年4月10日
专知会员服务
23+阅读 · 2020年4月22日
Arxiv
14+阅读 · 2021年11月11日
Arxiv
26+阅读 · 2021年10月5日


相关VIP内容
专知会员服务
234+阅读 · 2022年4月10日
专知会员服务
23+阅读 · 2020年4月22日
相关资讯