
当前军事推演中合成角色的行为能力是有限的,因为它们通常是由基于规则和反应性计算模型生成的,具有最低限度的智能。这种计算模型不能适应反映角色的经验,导致即使是通过昂贵和劳动密集型过程设计的最有效的行为模型也很脆弱。利用机器学习和合成实体的经验并结合适当的先验知识的、具备自适应能力的、基于观察的行为模型,可以解决现有计算行为模型中的问题,从而在军事训练模拟中创造更好的训练体验。
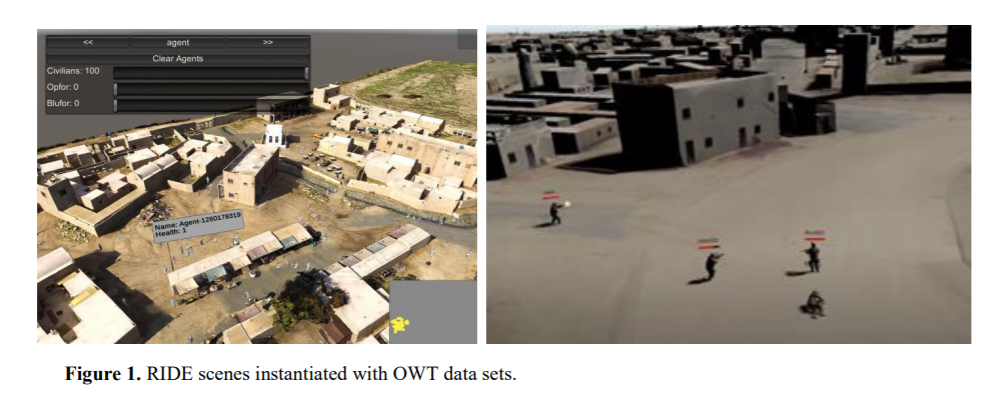
南加州大学创新技术研究所介绍了一个框架,旨在创建自主的合成角色,这些角色能够执行可信行为的连贯序列,同时在训练模拟中了解人类受训者及其需求。该框架汇集了三个相互补充的组成部分。第一个组件是基于Unity的仿真环境——快速集成和开发环境(RIDE)——支持One World Terraing(OWT)模型,能够运行和支持机器学习实验。第二个是Shiva,这是一个新颖的多智能体强化和模仿学习框架,可以与各种模拟环境接口,并且可以额外利用各种学习算法。最后一个组件是Sigma认知架构,它将通过符号和概率推理能力来增强行为模型。已经成功地创建了概念验证行为模型,在现实中利用这一框架,作为将机器学习引入军事模拟的重要一步。
论文全文:
https://www.zhuanzhi.ai/paper/2902032e89eae24167b560a5e2e0de47
成为VIP会员查看完整内容
相关内容

Arxiv
0+阅读 · 2022年4月14日
相关主题


相关VIP内容
相关资讯
相关论文
Arxiv
0+阅读 · 2022年4月14日