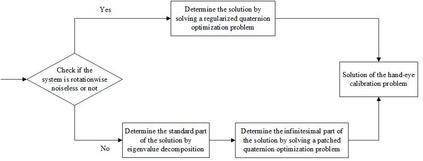
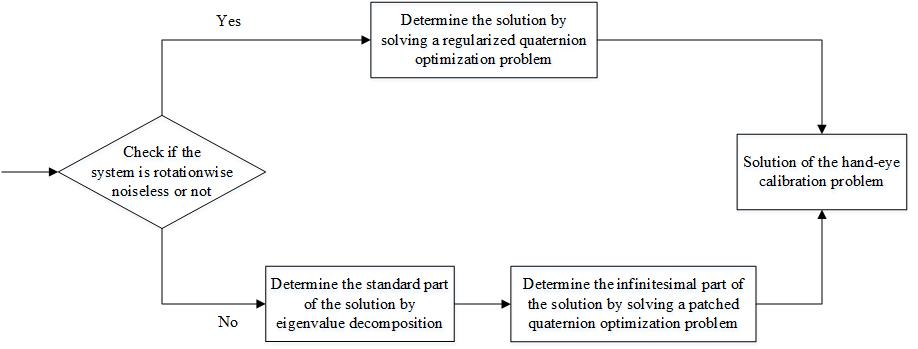
The hand-eye calibration problem is an important application problem in robot research. Based on the 2-norm of dual quaternion vectors, we propose a new dual quaternion optimization method for the hand-eye calibration problem. The dual quaternion optimization problem is decomposed to two quaternion optimization subproblems. The first quaternion optimization subproblem governs the rotation of the robot hand. It can be solved efficiently by the eigenvalue decomposition or singular value decomposition. If the optimal value of the first quaternion optimization subproblem is zero, then the system is rotationwise noiseless, i.e., there exists a ``perfect'' robot hand motion which meets all the testing poses rotationwise exactly. In this case, we apply the regularization technique for solving the second subproblem to minimize the distance of the translation. Otherwise we apply the patching technique to solve the second quaternion optimization subproblem. Then solving the second quaternion optimization subproblem turns out to be solving a quadratically constrained quadratic program. In this way, we give a complete description for the solution set of hand-eye calibration problems. This is new in the hand-eye calibration literature. The numerical results are also presented to show the efficiency of the proposed method.
翻译:手眼校准问题是机器人研究中的一个重要应用问题。 基于双四向矢量的 2- 温度, 我们为手眼校准问题提出一个新的双四优化方法。 双四优化问题分解成两个四优化子问题。 第一个四向优化子问题管理机器人手的旋转。 否则, 我们应用补丁技术解决第二个四益优化子问题。 然后解决第二个四元优化子问题的最佳值为零, 那么系统是无声的, 也就是说, 存在一个“ perfect” 机器人手动运动, 与所有测试完全吻合。 在这种情况下, 我们应用正规化技术来解决第二个子问题, 以尽量减少翻译的距离 。 否则, 我们应用补丁技术解决第二个四元优化子问题或单值分解。 然后解决第二个四元优化子问题的最佳值为零, 那么系统是无声的, 也就是说, 存在一个符合所有测试的“perfect” 机器人手动运动。 在此情况下, 我们应用正规化技术来尽量减少翻译的距离 。 我们用一个完整的平整式的平流方法来显示新的平流方法 。