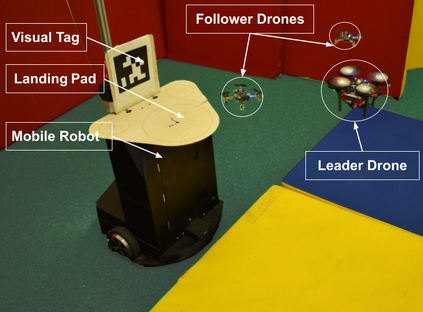
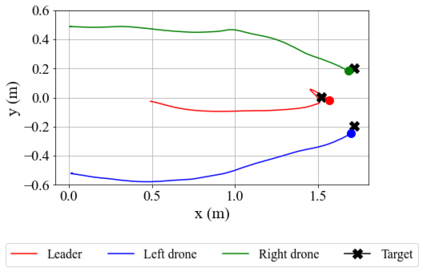
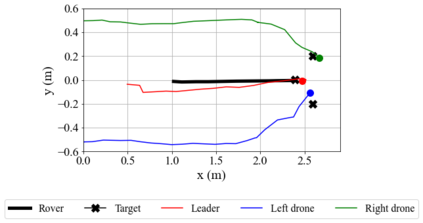
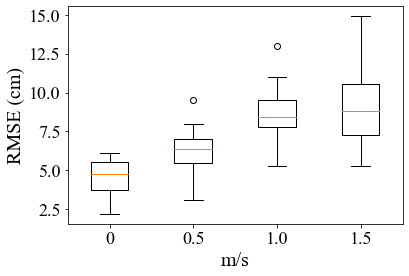
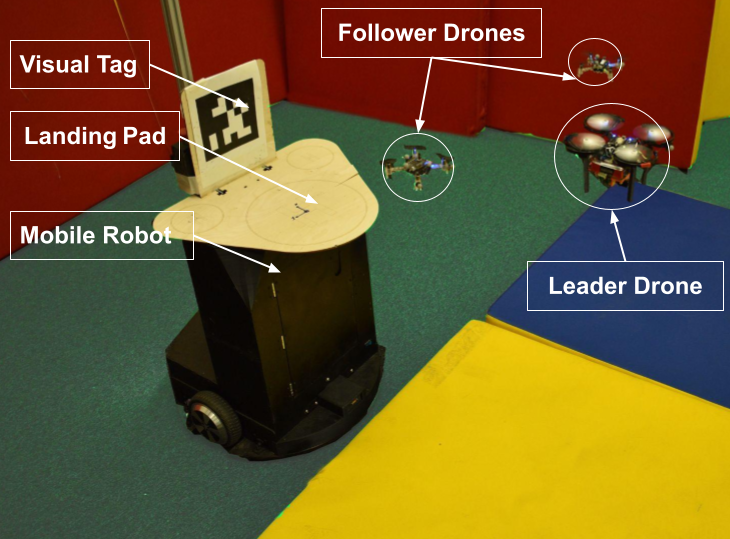
The paper focuses on a heterogeneous swarm of drones to achieve a dynamic landing of formation on a moving robot. This challenging task was not yet achieved by scientists. The key technology is that instead of facilitating each agent of the swarm of drones with computer vision that considerably increases the payload and shortens the flight time, we propose to install only one camera on the leader drone. The follower drones receive the commands from the leader UAV and maintain a collision-free trajectory with the artificial potential field. The experimental results revealed a high accuracy of the swarm landing on a static mobile platform (RMSE of 4.48 cm). RMSE of swarm landing on the mobile platform moving with the maximum velocities of 1.0 m/s and 1.5 m/s equals 8.76 cm and 8.98 cm, respectively. The proposed SwarmHive technology will allow the time-saving landing of the swarm for further drone recharging. This will make it possible to achieve self-sustainable operation of a multi-agent robotic system for such scenarios as rescue operations, inspection and maintenance, autonomous warehouse inventory, cargo delivery, and etc.
翻译:本文侧重于一组不同的无人机,以在移动的机器人上实现动态着陆。这一具有挑战性的任务尚未由科学家完成。关键技术是,我们不协助每个具有计算机视野的无人机群中的每个代理人员大大提高有效载荷并缩短飞行时间,而是提议在无人机头部安装一台照相机。无人机追随者接收无人机领头人的指令,并保持一个与人造潜在场无碰撞的轨道。实验结果显示,在静态移动平台(4.48厘米的RUSE)上着陆的群落非常精确。在移动平台上着陆的群落将分别以1.0米/秒和1.5米/秒的最大速度移动,相当于8.76厘米和8.98厘米。拟议的Swararm Hive技术将使得温暖能节省时间着陆,以便进一步进行无人机再电镀。这将使多试机机器人系统在救援行动、检查和维护、自动仓储、货运等情况下实现自我维持运行成为可能。