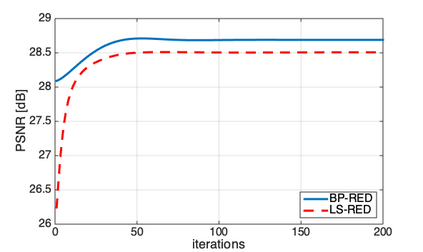
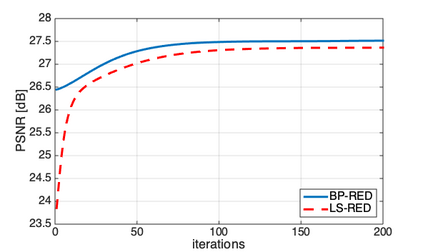
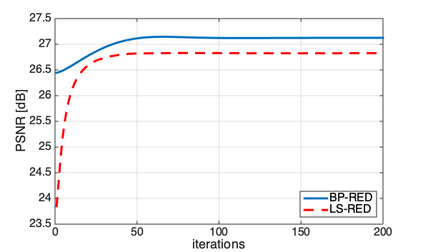
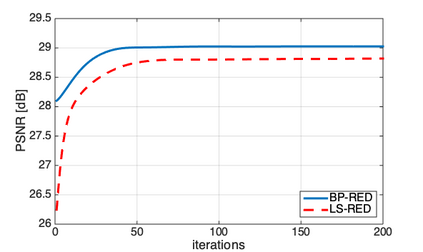
The vast majority of image recovery tasks are ill-posed problems. As such, methods that are based on optimization use cost functions that consist of both fidelity and prior (regularization) terms. A recent line of works imposes the prior by the Regularization by Denoising (RED) approach, which exploits the good performance of existing image denoising engines. Yet, the relation of RED to explicit prior terms is still not well understood, as previous work requires too strong assumptions on the denoisers. In this paper, we make two contributions. First, we show that the RED gradient can be seen as a (sub)gradient of a prior function--but taken at a denoised version of the point. As RED is typically applied with a relatively small noise level, this interpretation indicates a similarity between RED and traditional gradients. This leads to our second contribution: We propose to combine RED with the Back-Projection (BP) fidelity term rather than the common Least Squares (LS) term that is used in previous works. We show that the advantages of BP over LS for image deblurring and super-resolution, which have been demonstrated for traditional gradients, carry on to the RED approach.
翻译:绝大多数图像恢复任务都存在问题。 因此, 以优化使用成本功能为基础的方法, 包括忠诚和先前( 正规化) 术语。 最近的一行工程要求先采用Denoising (RED) 常规化方法, 利用现有图像去除引擎的良好性能。 然而, RED 与先前明确术语之间的关系仍然没有得到很好理解, 因为先前的工作要求过于强烈地假定Denoisers 。 在本文中, 我们做出两项贡献。 首先, 我们显示, RED 梯度可以被视为先前功能的( 次级), 而在点的取消版本中采用。 由于RED 通常在较小的噪音水平上应用, 这一解释表明RED 和传统梯度之间的相似性。 这导致我们的第二个贡献: 我们提议将RED 和 Back- Projection ( BBP) 的忠诚术语合并起来, 而不是在先前工作中使用的普通的最不平方( LS) 术语。 我们显示, RED 相对于 LS 的图像去除率和传统分辨率的优势, 已经显示, 以RED 梯度 。