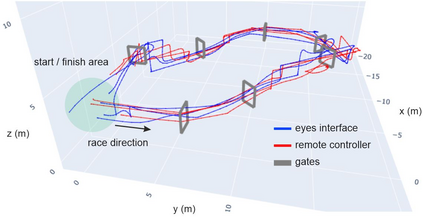
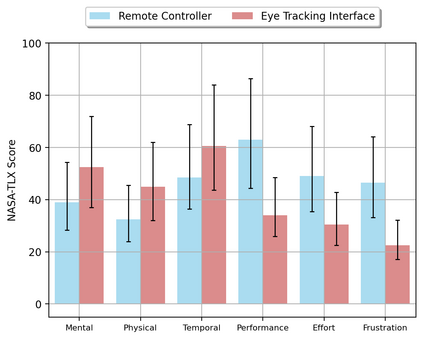
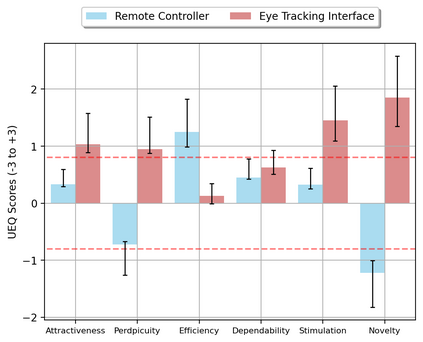
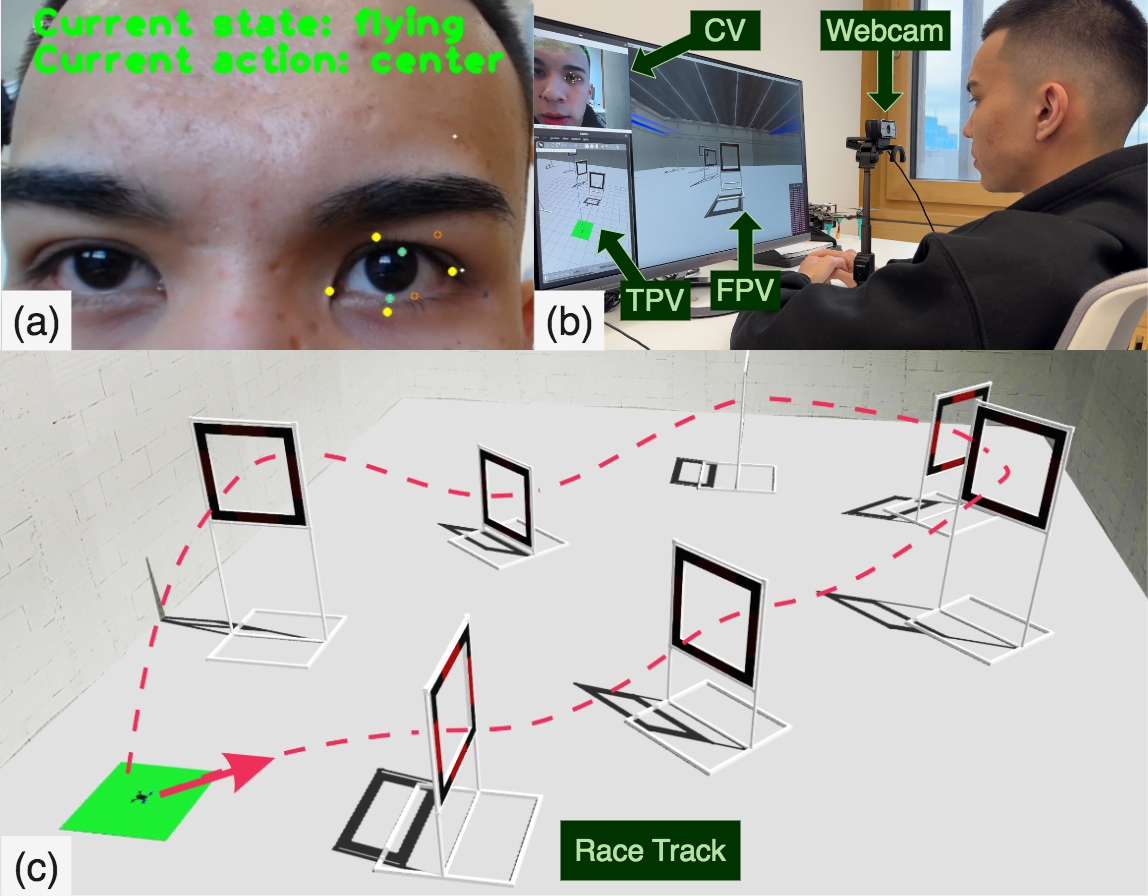
This paper introduces the GazeRace method for drone navigation, employing a computer vision interface facilitated by eye-tracking technology. This interface is designed to be compatible with a single camera and uses a convolutional neural network to convert eye movements into control commands for the drone. Experimental validation demonstrates that users equipped with the eye-tracking interface achieve comparable performance to a traditional remote control interface when completing a drone racing task. Ten participants completed flight tests in which they navigated a drone through a racing track in a Gazebo simulation environment. Users reduced drone trajectory length by 18% (73.44 m vs. 89.29 m) using the eye-tracking interface to navigate racing gates effectively. The time taken to complete the route using the eye-tracking method (average of 70.01 seconds) was only 3.5% slower than using the remote control method (also average of 70.01 seconds), indicating the good efficiency of the interface. It is also worth mentioning that four of the participants completed the race with an average time that was 25.9% faster than the other participants. In addition, users evaluated highly the performance (M = 34.0, SD = 14.2) and low frustration (M = 30.5, SD = 9.2) with the eye-tracking interface compared to performance (M = 63.0, SD = 10.1) and frustration (M = 49.0, SD = 11.7) with the baseline remote controller. The hedonic quality (M = 1.65, SD = 0.45) was also evaluated high by the users in the UEQ questionnaire.
翻译:暂无翻译