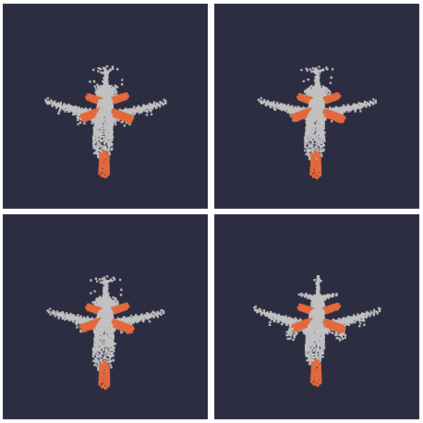
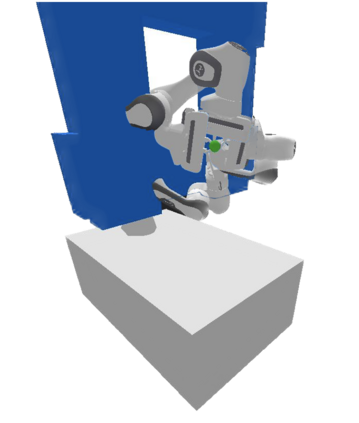
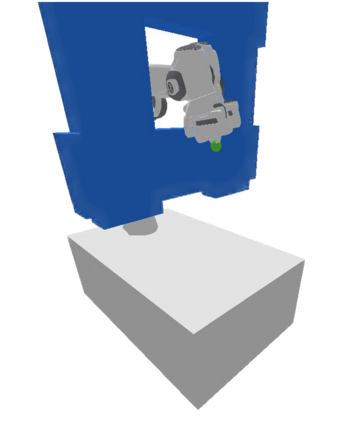
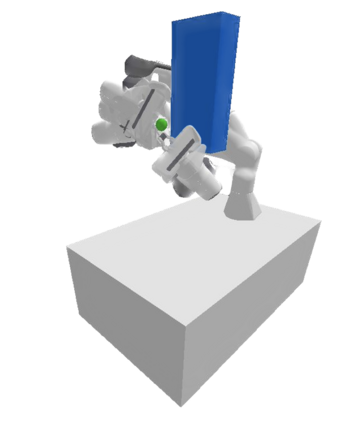
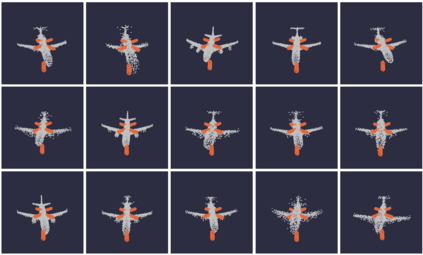
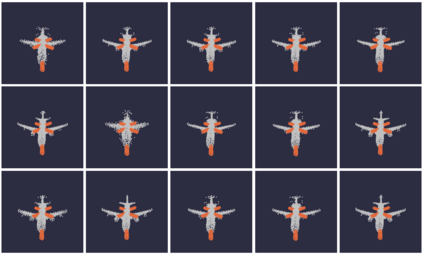
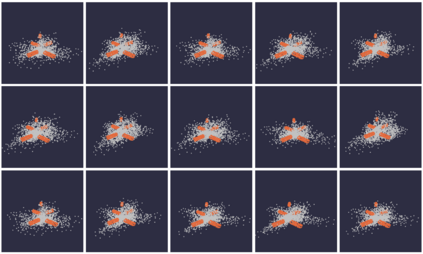
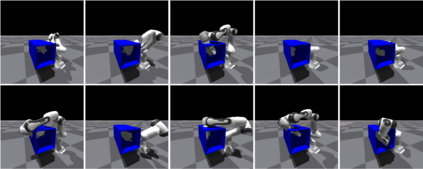
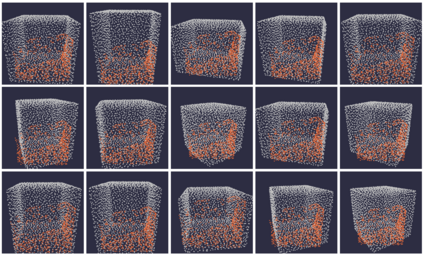
Adaptable models could greatly benefit robotic agents operating in the real world, allowing them to deal with novel and varying conditions. While approaches such as Bayesian inference are well-studied frameworks for adapting models to evidence, we build on recent advances in deep generative models which have greatly affected many areas of robotics. Harnessing modern GPU acceleration, we investigate how to quickly adapt the sample generation of neural network models to observations in robotic tasks. We propose a simple and general method that is applicable to various deep generative models and robotic environments. The key idea is to quickly fine-tune the model by fitting it to generated samples matching the observed evidence, using the cross-entropy method. We show that our method can be applied to both autoregressive models and variational autoencoders, and demonstrate its usability in object shape inference from grasping, inverse kinematics calculation, and point cloud completion.
翻译:暂无翻译