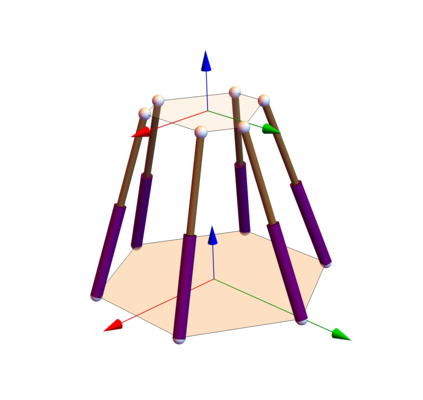
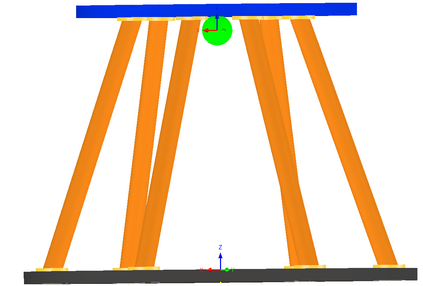
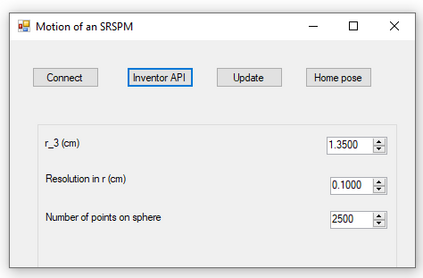
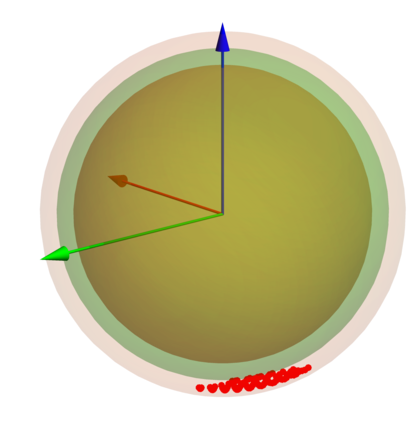
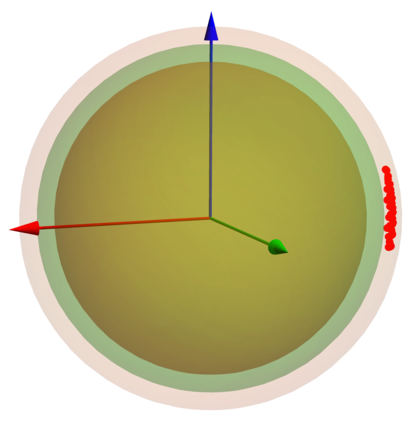
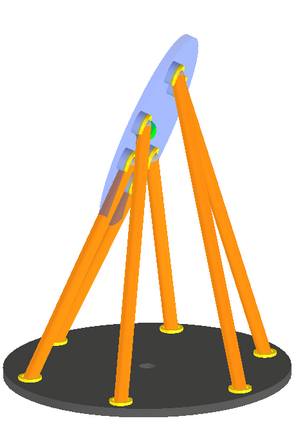
This paper presents a method of validation of the size of the largest collision-free sphere (CFS) of a 6-6 Stewart-Gough platform manipulator (SGPM) for a given orientation of its moving platform (MP) using the Application Programming Interface (API) of a CAD software. The position of the MP is updated via the API in an automated manner over a set of samples within a shell enclosing the surface of the CFS. For each pose of the manipulator, each pair of legs is investigated for mutual collisions. The CFS is considered safe or validated iff none of the points falling inside the CFS lead to a collision between any pair of legs. This approach can not only validate the safety of a precomputed CFS, but also estimate the same for any spatial parallel manipulator.
翻译:暂无翻译