
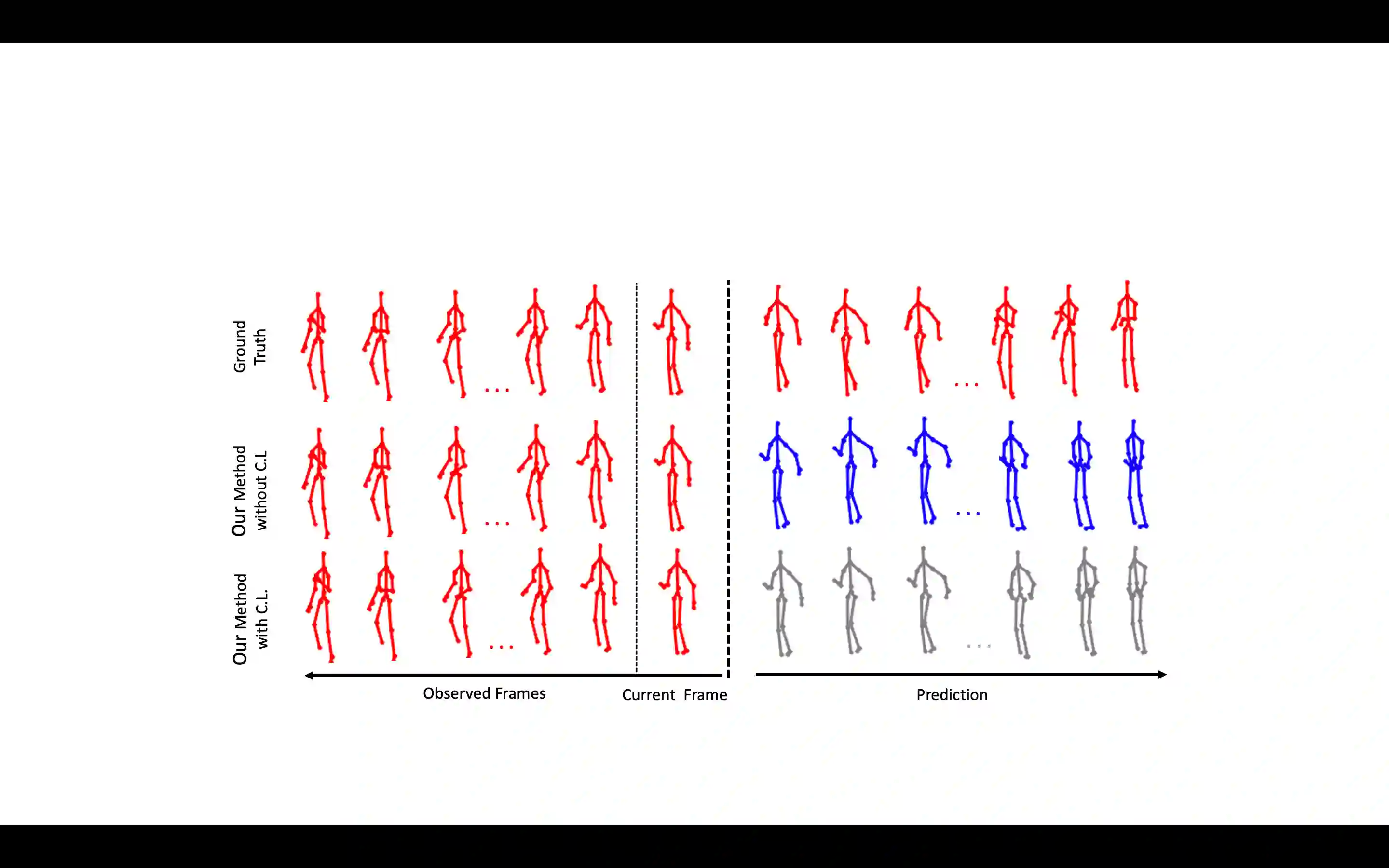
Human motion prediction is an essential component for enabling closer human-robot collaboration. The task of accurately predicting human motion is non-trivial. It is compounded by the variability of human motion, both at a skeletal level due to the varying size of humans and at a motion level due to individual movement's idiosyncrasies. These variables make it challenging for learning algorithms to obtain a general representation that is robust to the diverse spatio-temporal patterns of human motion. In this work, we propose a modular sequence learning approach that allows end-to-end training while also having the flexibility of being fine-tuned. Our approach relies on the diversity of training samples to first learn a robust representation, which can then be fine-tuned in a continual learning setup to predict the motion of new subjects. We evaluated the proposed approach by comparing its performance against state-of-the-art baselines. The results suggest that our approach outperforms other methods over all the evaluated temporal horizons, using a small amount of data for fine-tuning. The improved performance of our approach opens up the possibility of using continual learning for personalized and reliable motion prediction.
翻译:人类运动预测是更紧密的人类-机器人协作的必要组成部分。 准确预测人类运动的任务并非三重任务。 更复杂的是,由于人类规模不同,在骨骼层次和运动层次,由于个人运动的特异性,人类运动的预测都是不可或缺的组成部分。 这些变数使得学习算法难以获得对多种人类运动的时空模式具有强力的一般代表性。 在这项工作中,我们提议采用模块式序列学习方法,允许端到端培训,同时具有微调的灵活性。 我们的方法依靠培训样本的多样性,首先学习强健的代表,然后在持续学习的设置中进行微调,以预测新主题的运动。我们评估了拟议方法,将其表现与最新基线进行比较。结果显示,我们的方法超越了所有经过评估的时间范围的其他方法,利用少量数据进行微调。我们方法的改进性能开启了利用持续学习来进行个人化和可靠的运动预测的可能性。
相关内容

Source: Apple - iOS 8

