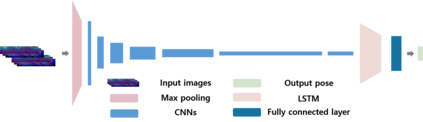
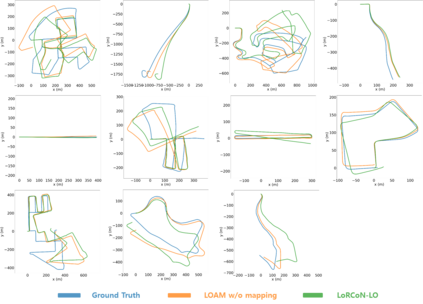
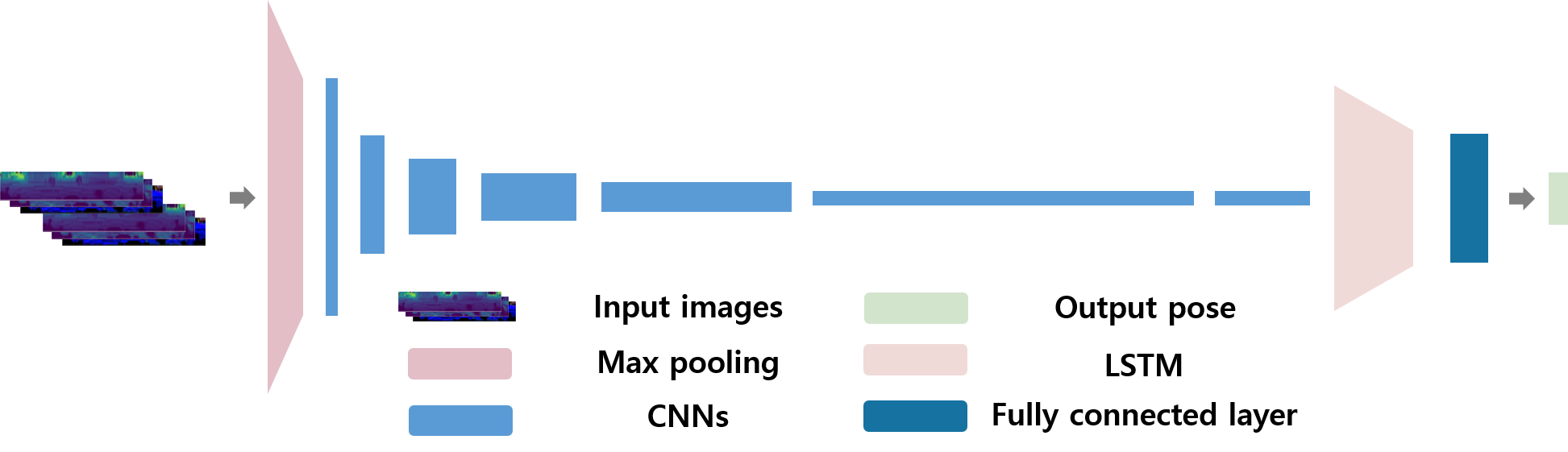
We propose a deep learning-based LiDAR odometry estimation method called LoRCoN-LO that utilizes the long-term recurrent convolutional network (LRCN) structure. The LRCN layer is a structure that can process spatial and temporal information at once by using both CNN and LSTM layers. This feature is suitable for predicting continuous robot movements as it uses point clouds that contain spatial information. Therefore, we built a LoRCoN-LO model using the LRCN layer, and predicted the pose of the robot through this model. For performance verification, we conducted experiments exploiting a public dataset (KITTI). The results of the experiment show that LoRCoN-LO displays accurate odometry prediction in the dataset. The code is available at https://github.com/donghwijung/LoRCoN-LO.
翻译:我们提出了一种基于深度学习的激光雷达测距估计方法,称为LoRCoN-LO,它利用了长期循环卷积网络(LRCN)结构。 LRCN层是一种结构,它可以通过使用CNN和LSTM层同时处理空间和时间信息。这个特性非常适合预测机器人的连续运动,因为它使用包含空间信息的点云。因此,我们使用LRCN层构建了LoRCoN-LO模型,并通过该模型预测机器人的姿态。为了验证性能,我们进行了一些实验,利用了一个公共数据集(KITTI)。实验结果显示,LoRCoN-LO可以在数据集中显示准确的测距预测。 代码可在 https://github.com/donghwijung/LoRCoN-LO 找到。