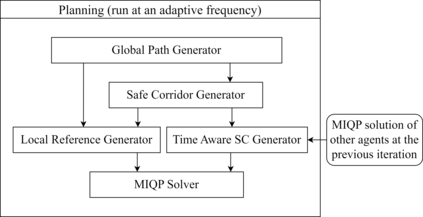
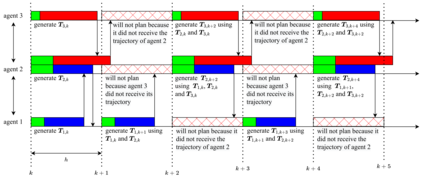
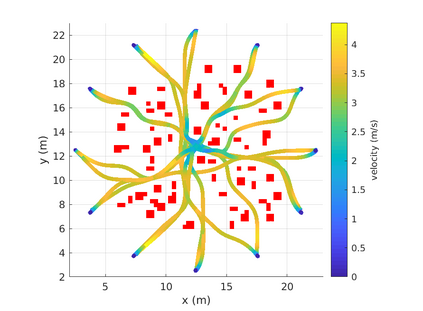
There are many industrial, commercial and social applications for multi-agent planning for multirotors such as autonomous agriculture, infrastructure inspection and search and rescue. Thus, improving on the state-of-the-art of multi-agent planning to make it a viable real-world solution is of great benefit. In this work, we propose a new method for multi-agent planning in a static environment that improves our previous work by making it fully online as well as robust to communication latency. The proposed framework generates a global path and a Safe Corridor to avoid static obstacles in an online fashion (generated offline in our previous work). It then generates a time-aware Safe Corridor which takes into account the future positions of other agents to avoid intra-agent collisions. The time-aware Safe Corridor is given with a local reference trajectory to an MIQP (Mixed-Integer Quadratic Problem)/MPC (Model Predictive Control) solver that outputs a safe and optimal trajectory. The planning frequency is adapted to account for communication delays. The proposed method is fully online, real-time, decentralized, and synchronous. It is compared to 3 recent state-of-the-art methods in simulations. It outperforms all methods in robustness and safety as well as flight time. It also outperforms the only other state-of-the-art latency robust method in computation time.
翻译:暂无翻译