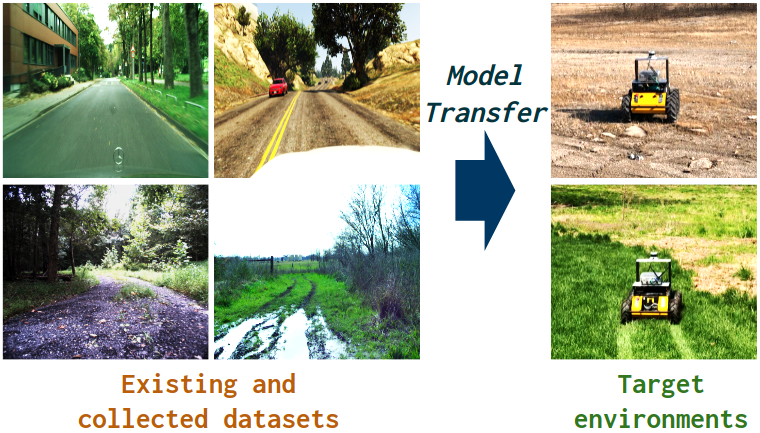
Traversability prediction is a fundamental perception capability for autonomous navigation. The diversity of data in different domains imposes significant gaps to the prediction performance of the perception model. In this work, we make efforts to reduce the gaps by proposing a novel coarse-to-fine unsupervised domain adaptation (UDA) model - CALI. Our aim is to transfer the perception model with high data efficiency, eliminate the prohibitively expensive data labeling, and improve the generalization capability during the adaptation from easy-to-obtain source domains to various challenging target domains. We prove that a combination of a coarse alignment and a fine alignment can be beneficial to each other and further design a first-coarse-then-fine alignment process. This proposed work bridges theoretical analyses and algorithm designs, leading to an efficient UDA model with easy and stable training. We show the advantages of our proposed model over multiple baselines in several challenging domain adaptation setups. To further validate the effectiveness of our model, we then combine our perception model with a visual planner to build a navigation system and show the high reliability of our model in complex natural environments where no labeled data is available.
翻译:易变性预测是自主导航的基本感知能力。 不同领域数据的多样性给感知模型的预测性表现带来了巨大的差距。 在这项工作中,我们通过提出一个新的粗到粗的不受监督的域适应(UDA)模型(CALI)来努力缩小差距。 我们的目标是将感知模型转换为高数据效率,消除昂贵的数据标签,并提高在从容易获取的来源域到各种具有挑战性的目标域的适应过程中的普及能力。 我们证明,将粗糙的对齐和细细的对齐结合起来,可以对彼此有益,并进一步设计第一个粗糙的对齐进程。这个拟议的工作桥梁理论分析和算法设计导致一个高效的UDA模型,并进行简单而稳定的培训。 我们展示了我们提议的模型在多个具有挑战性的域适应设置中相对于多个基线的优势。 为了进一步验证我们的模型的有效性,我们随后将我们的感知模型与视觉规划者结合起来,以建立一个导航系统,并显示我们模型在没有贴标签数据的复杂自然环境中的高度可靠性。