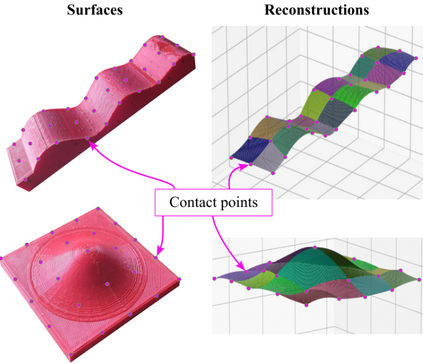
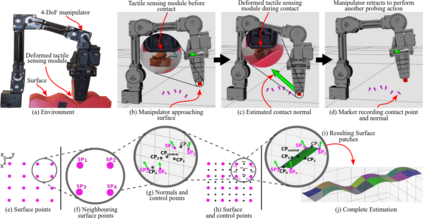
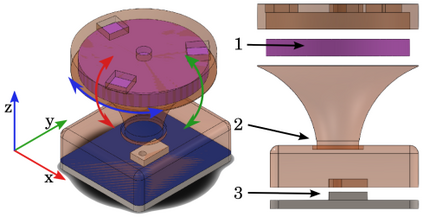
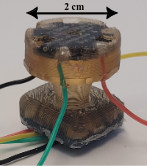
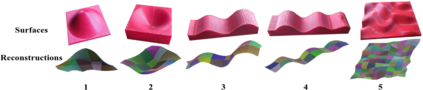
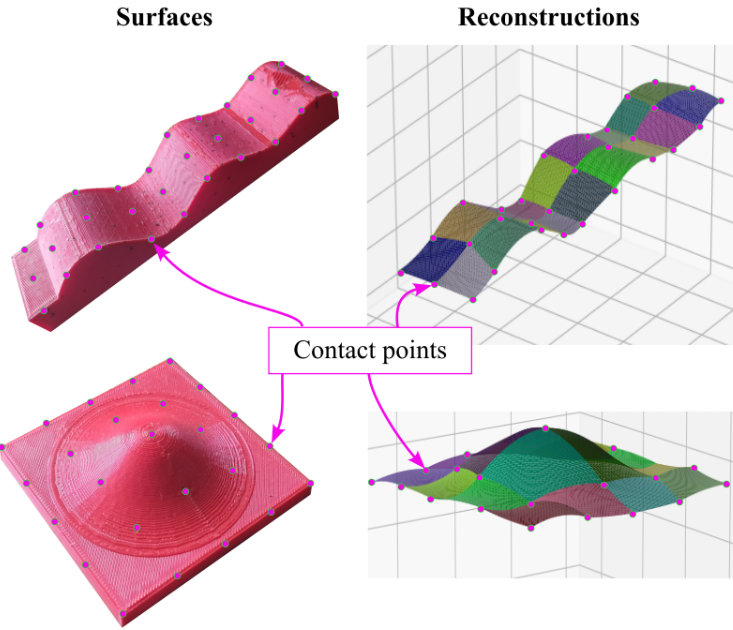
Non-flat surfaces pose difficulties for robots operating in unstructured environments. Reconstructions of uneven surfaces may only be partially possible due to non-compliant end-effectors and limitations on vision systems such as transparency, reflections, and occlusions. This study achieves blind surface reconstruction by harnessing the robotic manipulator's kinematic data and a compliant tactile sensing module, which incorporates inertial, magnetic, and pressure sensors. The module's flexibility enables us to estimate contact positions and surface normals by analyzing its deformation during interactions with unknown objects. While previous works collect only positional information, we include the local normals in a geometrical approach to estimate curvatures between adjacent contact points. These parameters then guide a spline-based patch generation, which allows us to recreate larger surfaces without an increase in complexity while reducing the time-consuming step of probing the surface. Experimental validation demonstrates that this approach outperforms an off-the-shelf vision system in estimation accuracy. Moreover, this compliant haptic method works effectively even when the manipulator's approach angle is not aligned with the surface normals, which is ideal for unknown non-flat surfaces.
翻译:暂无翻译