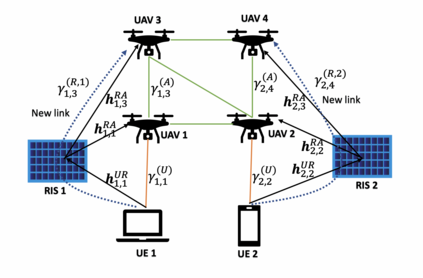
Reconfigurable intelligent surfaces (RISs) are expected to make future 6G networks more connected and resilient against node failures, due to their ability to introduce controllable phase-shifts onto impinging electromagnetic waves and impose link redundancy. Meanwhile, unmanned aerial vehicles (UAVs) are prone to failure due to limited energy, random failures, or targeted failures, which causes network disintegration that results in information delivery loss. In this paper, we show that the integration between UAVs and RISs for improving network connectivity is crucial. We utilize RISs to provide path diversity and alternative connectivity options for information flow from user equipments (UEs) to less critical UAVs by adding more links to the network, thereby making the network more resilient and connected. To that end, we first define the criticality of UAV nodes, which reflects the importance of some nodes over other nodes. We then employ the algebraic connectivity metric, which is adjusted by the reflected links of the RISs and their criticality weights, to formulate the problem of maximizing the network connectivity. Such problem is a computationally expensive combinatorial optimization. To tackle this problem, we propose a relaxation method such that the discrete scheduling constraint of the problem is relaxed and becomes continuous. Leveraging this, we propose two efficient solutions, namely semi-definite programming (SDP) optimization and perturbation heuristic, which both solve the problem in polynomial time. For the perturbation heuristic, we derive the lower and upper bounds of the algebraic connectivity obtained by adding new links to the network. Finally, we corroborate the effectiveness of the proposed solutions through extensive simulation experiments.
翻译:暂无翻译