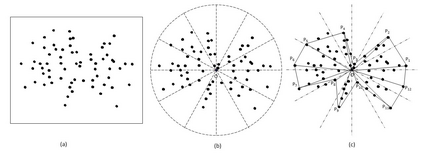
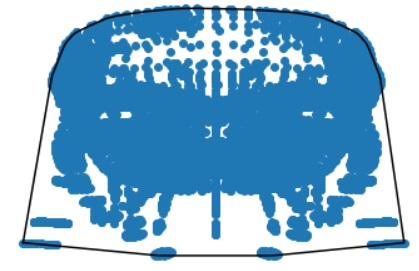
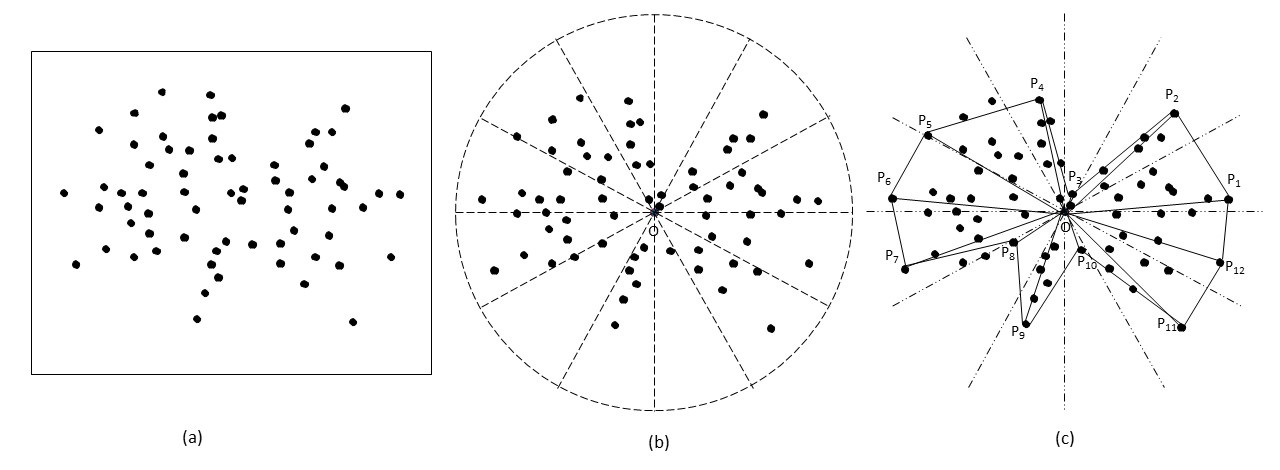
An incremental approach for computation of convex hull for data points in two-dimensions is presented. The algorithm is not output-sensitive and costs a time that is linear in the size of data points at input. Graham's scan is applied only on a subset of the data points, represented at the extremal of the dataset. Points are classified for extremal, in proportion with the modular distance, about an imaginary point interior to the region bounded by convex hull of the dataset assumed for origin or center in polar coordinate. A subset of the data is arrived by terminating at until an event of no change in maximal points is observed per bin, for iteratively and exponentially decreasing intervals.
翻译:提出了计算两层中数据点的混凝土壳的递增方法。 算法不是对产出敏感, 其成本是输入数据点大小线性的时间。 Graham的扫描只应用于一组数据点, 代表于数据集的极端。 点按照模块距离, 分类为极坐标中假定的原点或中心点的混凝土体体在区域内的虚构点内部。 一组数据通过终止, 直到每个文件箱中最大点没有变化时, 以迭接和指数递减的间隔结束 。