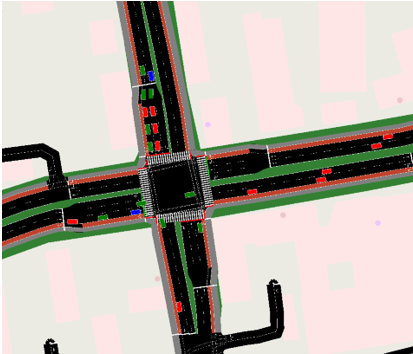
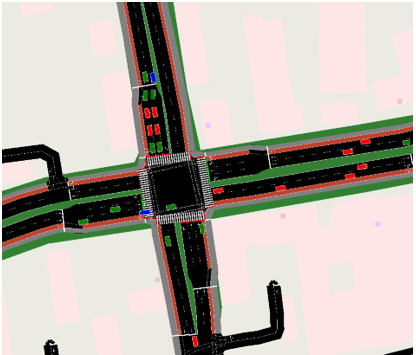
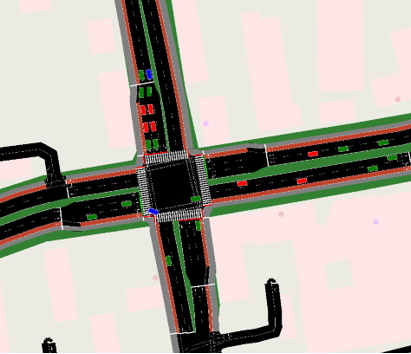
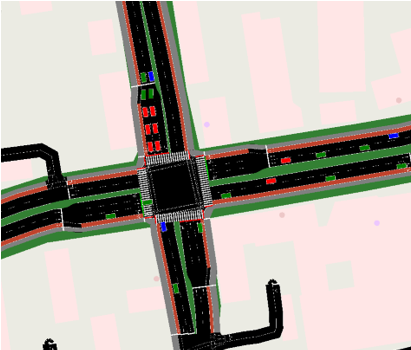
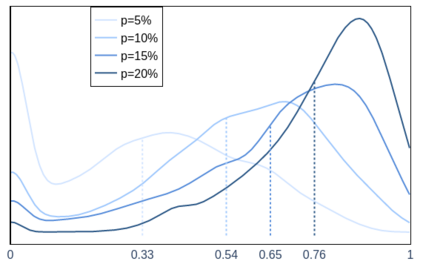
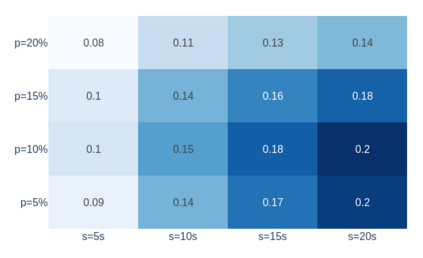
Floating Car Observers (FCOs) are an innovative method to collect traffic data by deploying sensor-equipped vehicles to detect and locate other vehicles. We demonstrate that even a small penetration rate of FCOs can identify a significant amount of vehicles at a given intersection. This is achieved through the emulation of detection within a microscopic traffic simulation. Additionally, leveraging data from previous moments can enhance the detection of vehicles in the current frame. Our findings indicate that, with a 20-second observation window, it is possible to recover up to 20\% of vehicles that are not visible by FCOs in the current timestep. To exploit this, we developed a data-driven strategy, utilizing sequences of Bird's Eye View (BEV) representations of detected vehicles and deep learning models. This approach aims to bring currently undetected vehicles into view in the present moment, enhancing the currently detected vehicles. Results of different spatiotemporal architectures show that up to 41\% of the vehicles can be recovered into the current timestep at their current position. This enhancement enriches the information initially available by the FCO, allowing an improved estimation of traffic states and metrics (e.g. density and queue length) for improved implementation of traffic management strategies.
翻译:暂无翻译