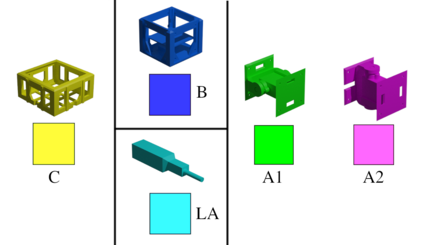
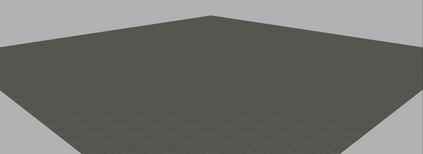
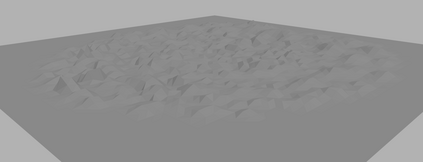
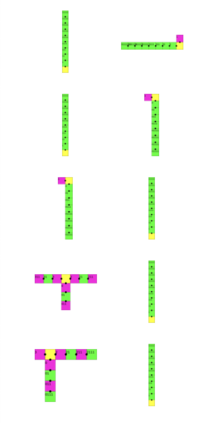
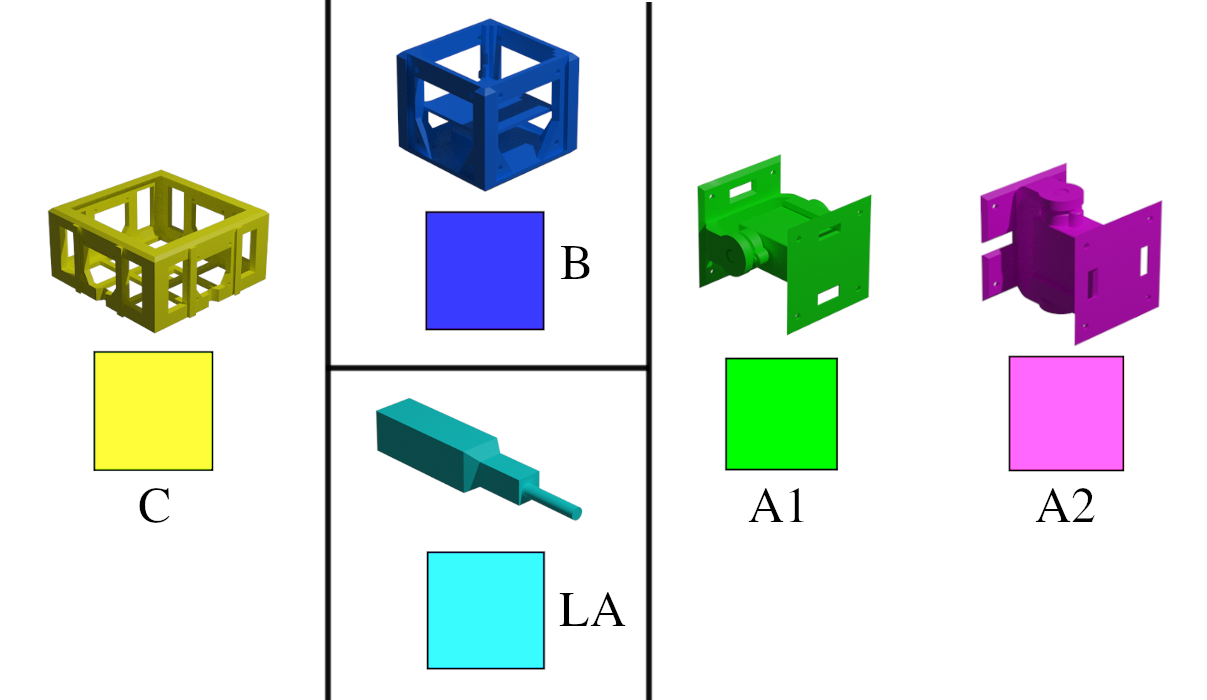
The field of evolutionary robotics uses principles of natural evolution to design robots. In this paper, we study the effect of adding a new module inspired by the skeletal muscle to the existing RoboGen framework: the linear actuator. Additionally, we investigate how robots evolved in a plain environment differ from robots evolved in a rough environment. We consider the task of directed locomotion for comparing evolved robot morphologies. The results show that the addition of the linear actuator does not have a significant impact on the performance and morphologies of robots evolved in a plain environment. However, we find significant differences in the morphologies of robots evolved in a plain environment and robots evolved in a rough environment. We find that more complex behavior and morphologies emerge when we change the terrain of the environment.
翻译:进化机器人领域使用自然进化原则来设计机器人。 在本文中, 我们研究在现有的机器人框架( RoboGen 框架)中添加一个由骨骼肌肉启发的新模块的效果: 线性动因。 此外, 我们调查机器人在平坦环境中的进化与机器人在粗糙环境中的进化有何不同。 我们考虑定向移动任务来比较进化的机器人形态。 结果显示, 添加线性动因对机器人在平坦环境中进化的性能和形态没有重大影响。 然而, 我们发现机器人在平坦环境中进化的形态和机器人在粗糙环境中的进化差异很大。 我们发现,当我们改变环境的地形时, 会出现更复杂的行为和形态。