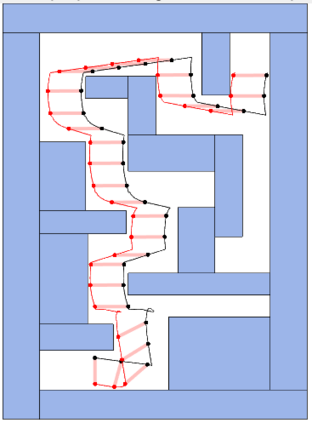
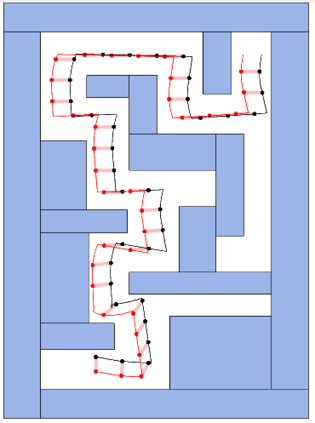
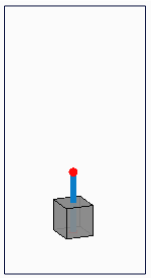
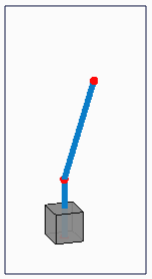
Collision avoidance is a widely investigated topic in robotic applications. When applying collision avoidance techniques to a mobile robot, how to deal with the spatial structure of the robot still remains a challenge. In this paper, we design a configuration-aware safe control law by solving a Quadratic Programming (QP) with designed Control Barrier Functions (CBFs) constraints, which can safely navigate a mobile robotic arm to a desired region while avoiding collision with environmental obstacles. The advantage of our approach is that it correctly and in an elegant way incorporates the spatial structure of the mobile robotic arm. This is achieved by merging geometric restrictions among mobile robotic arm links into CBFs constraints. Simulations on a rigid rod and the modeled mobile robotic arm are performed to verify the feasibility and time-efficiency of proposed method. Numerical results about the time consuming for different degrees of freedom illustrate that our method scales well with dimension.
翻译:在机器人应用中,避免碰撞是一个广泛调查的专题。在对移动机器人应用避免碰撞技术时,如何应对机器人的空间结构仍是一个挑战。在本文中,我们设计了一个配置安全控制法,解决了设计有控制障碍功能限制的四方方案(QP),它可以安全地将移动机器人臂引导到理想区域,同时避免与环境障碍的碰撞。我们的方法的优点在于它正确和优雅地融入了移动机器人臂的空间结构。这是通过将移动机器人臂连接的几何限制与 CBF的制约相结合来实现的。对硬棒和模型型移动机器人臂进行了模拟,以核实拟议方法的可行性和时间效率。关于不同自由度的时间消耗的数值结果表明,我们的方法与尺寸相当。