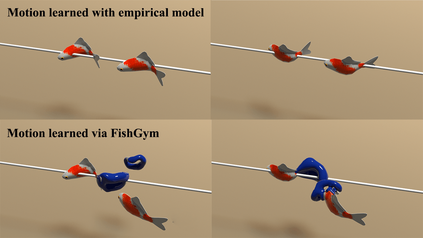
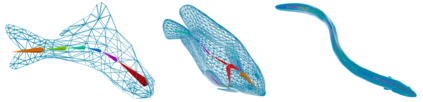
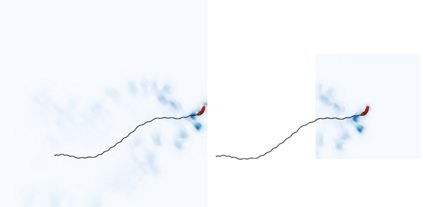
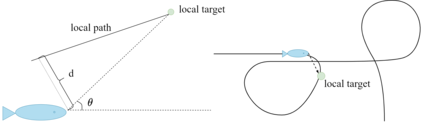
Bionic underwater robots have demonstrated their superiority in many applications. Yet, training their intelligence for a variety of tasks that mimic the behavior of underwater creatures poses a number of challenges in practice, mainly due to lack of a large amount of available training data as well as the high cost in real physical environment. Alternatively, simulation has been considered as a viable and important tool for acquiring datasets in different environments, but it mostly targeted rigid and soft body systems. There is currently dearth of work for more complex fluid systems interacting with immersed solids that can be efficiently and accurately simulated for robot training purposes. In this paper, we propose a new platform called "FishGym", which can be used to train fish-like underwater robots. The framework consists of a robotic fish modeling module using articulated body with skinning, a GPU-based high-performance localized two-way coupled fluid-structure interaction simulation module that handles both finite and infinitely large domains, as well as a reinforcement learning module. We leveraged existing training methods with adaptations to underwater fish-like robots and obtained learned control policies for multiple benchmark tasks. The training results are demonstrated with reasonable motion trajectories, with comparisons and analyses to empirical models as well as known real fish swimming behaviors to highlight the advantages of the proposed platform.
翻译:水下生物机器人在很多应用中表现出其优越性。然而,为模拟水下生物行为的各种任务培训其智能,在实践上带来了许多挑战,主要原因是缺乏大量现有培训数据以及实际自然环境成本高昂。或者,模拟被视为在不同环境中获取数据集的可行和重要工具,但大多数是针对僵硬和软体的机体系统。目前,与浸泡固体互动的较复杂的流体系统缺乏工作,这些系统可以高效和准确地模拟用于机器人培训目的。在本文中,我们提议了一个名为“FishGym”的新平台,可用于培训类似鱼类的水下机器人。框架包括一个机器人鱼模型模块,使用有皮肤的分解体,一个基于GPU的高性能本地化双向组合的液压结构互动模拟模块,处理有限和无限大的域,以及一个强化学习模块。我们利用了现有的培训方法,对水下鱼类机器人进行了适应,并获得了多项基准任务方面的学习控制政策。拟议培训结果以合理的运动模型和水上实验模型的形式展示了模拟。拟议培训结果,以合理的运动模型的形式展示了鱼的先进经验。