【泡泡一分钟】机器人顶级会议精华提炼(20181203-20181209)
每天一分钟,带你读遍机器人顶级会议文章
来源:ICCV 2018
播音员:王晓鹏
汇总:陈世浪,颜青松
编译:泡泡一分钟全体组员
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权。

摘要

2018年12月03日至2018年12月09日,泡泡一分钟共推送了10篇文章,其内容涉及场景描述(4篇)、三维重建(2篇)、位姿估计(2篇)、相机标定(1篇)和图像匹配(1篇)等方面的内容。
场景描述
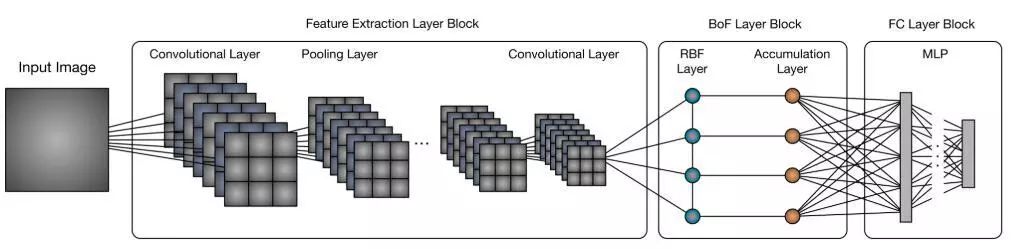
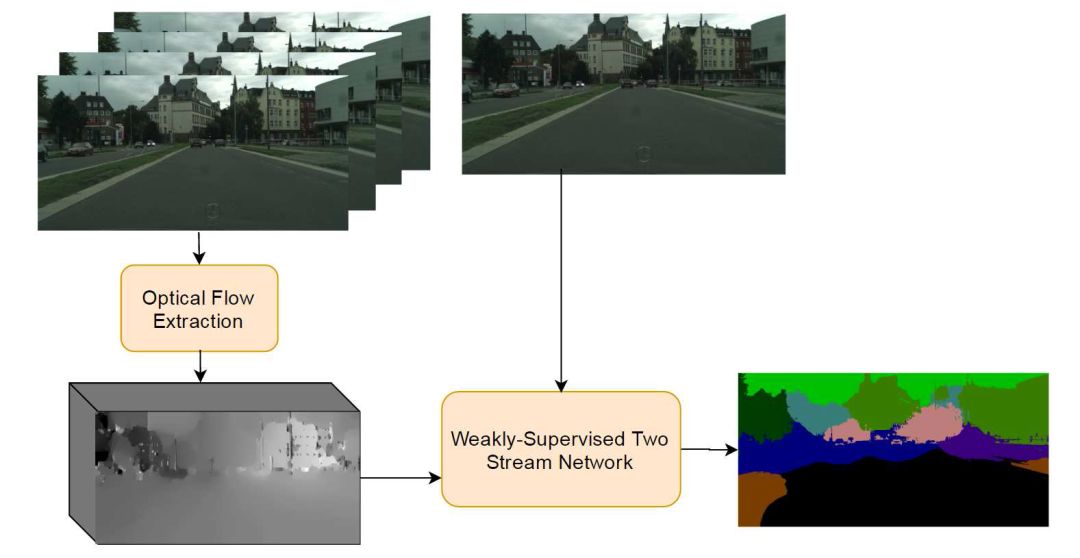
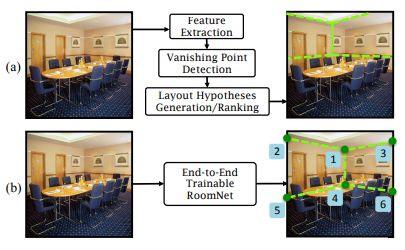
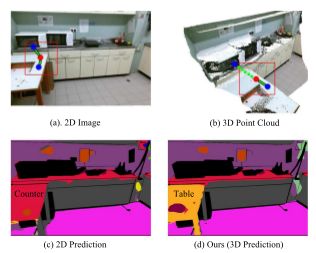
一直以来,场景描述就是SLAM研究的方向之一,本周介绍了四篇相关论文。第一篇文章介绍一种使用神经网络方法构建词袋模型的方法,第二篇文章则介绍了如何使用弱监督的方式来进行语义分割,第三篇文章展示了一个端到端的估计房屋关键点算法,最后一篇文章则是介绍如何使用RGB-D进行3D语义分割。
三维重建
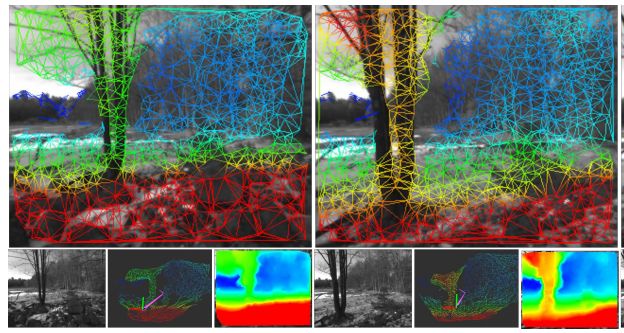
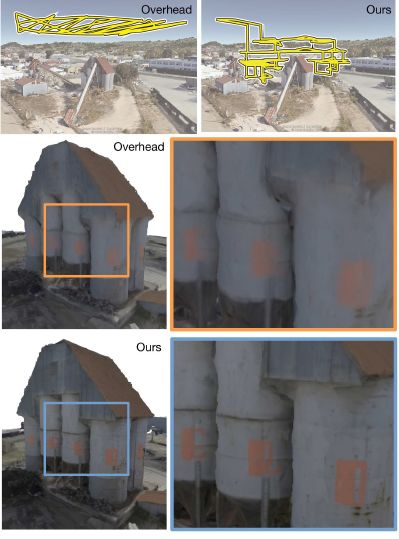
三维重建方面,本周介绍了两篇文章。一篇介绍了如何利用单目进行深度图估计,并在此基础上得到三维表面;另一篇文章则介绍了如何主动规划路径,保证三维场景重建的完整度。
位姿估计
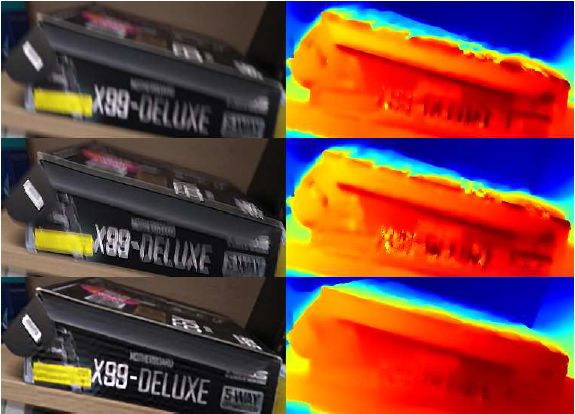
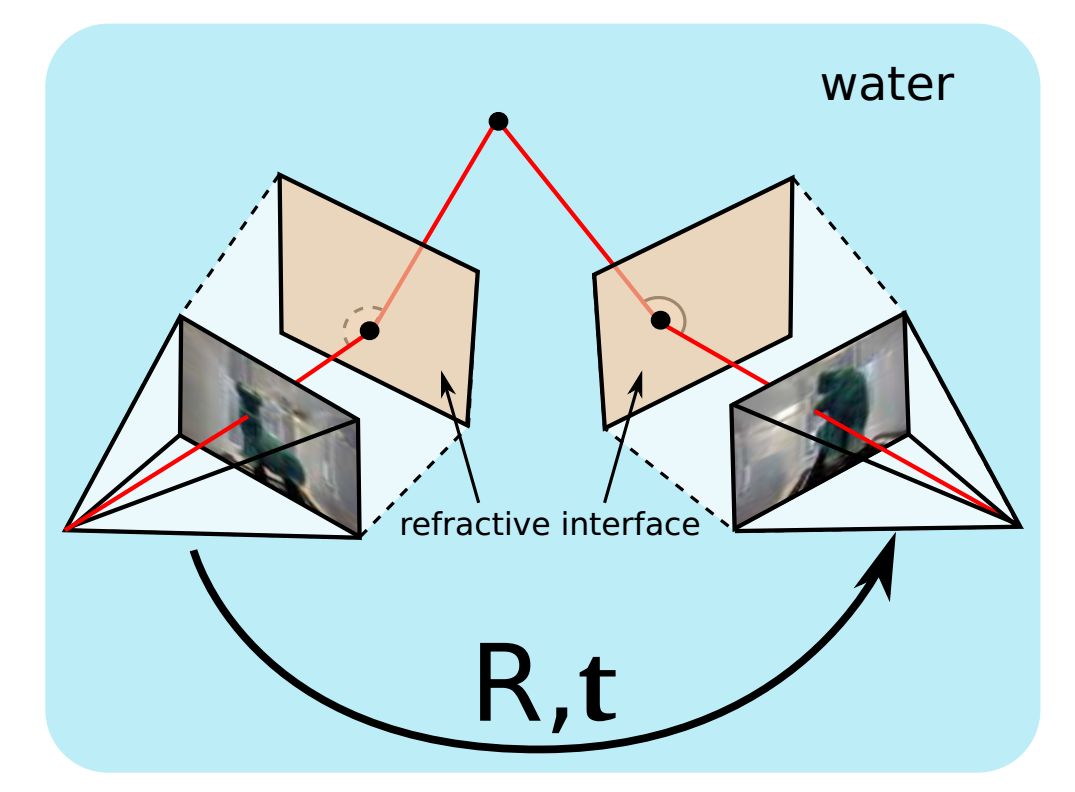
位姿估计由于其复杂性,一直以来就得到了广泛的关注。本周介绍了两篇相关文章。第一篇文章介绍了如何使用模糊图像序列完成摄像机的位姿计算,当然也同时恢复了深度等等信息。第二篇文章也非常有趣,介绍了使用水下影像来恢复3D场景的几何结构。
相机标定
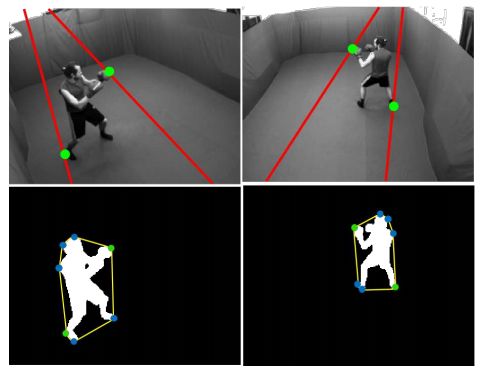
相机标定是一切多视几何的基础,本周的论文介绍了一种利用运动轮廓约束的方法进行多相机标定的方法,同时具有较高的精度和效率。
图像匹配
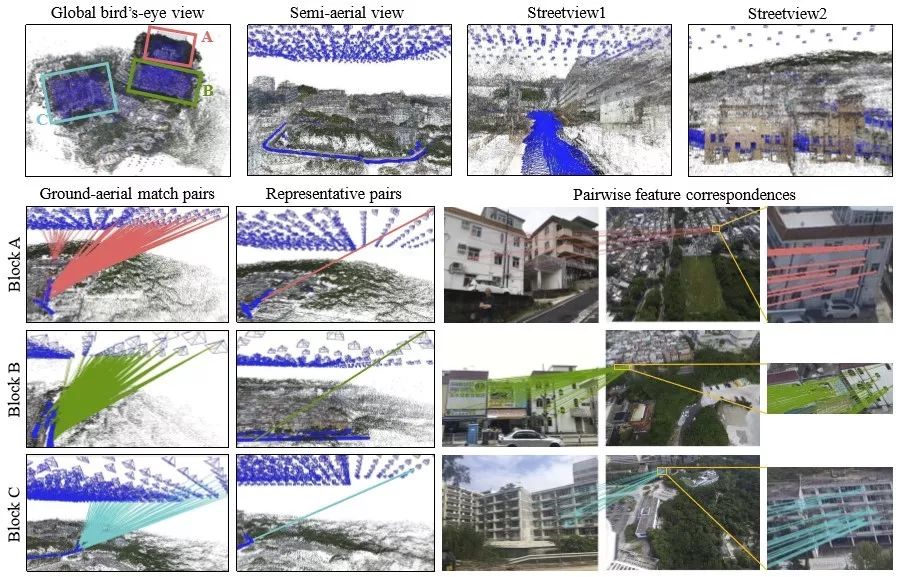
图像匹配方面,本周介绍的论文提出了一种尺度不变的图像匹配方法,以解决不同视角非常大尺度变化的问题。

如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com