【泡泡一分钟】点密度适应性点云配准
每天一分钟,带你读遍机器人顶级会议文章
标题:Density Adaptive Point Set Registration
作者:Felix J¨aremo Lawin, Martin Danelljan, Fahad Shahbaz Khan, Per-Erik Forss´en, Michael Felsberg
来源:CVPR2018
播音员:清蒸鱼
编译:潘越
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

大家好,今天为大家带来的文章是——点密度适应性点云配准,该文章发表于CVPR2018。
近年来,基于概率的点云配准算法得到了不少具有竞争力的成果。这些方法估计了点云的概率分布模型。尽管这种方法有一定可靠成效,它对点密度的变化十分敏感。这种基础问题主要由不同点云的扫描传感器位置变化导致。这篇文章重新研究了基于概率的配准模式。与之前工作不同,这篇文章把场景的内在结构建模成一个潜在概率分布,导出了点云密度变化中的不变性。场景的概率模型与配准参数都由最小化最大期望框架下的Kullback-Leibler 差异推得。这篇文章的点密度适应性点云配准成功地解决了地面站激光雷达应用中常常遇到的点密度不均的情况。这篇文章还在多个有挑战性的实际激光雷达测试集上进行实验,结果表明我们的方法无需重采样,在多视角配准方面优于当前最优的基于概率的配准算法。
算法介绍
为解决不均点密度造成的配准难题,本文修改了概率配准方法的内在机理和建模假设。该算法目标为得到场景实际三维结构的模型而非直接建模点密度,在之前提出的概率方法联合多点云配准(JRMPC) 的基础上引入了场景的潜在概率分布,可以将所有如墙,地,物体的三维结构编码于其中。利用高斯混合模型 (GMM) 并最小化参数化密度方程的Kullback-Leibler (KL) 差异,再应用最大期望 (EM) 算法解之。

图一 两个有着极大点密度变化的示例激光点云(第一行)目前最优的概率方法结果(第二三行左列)仅仅配准了高、点密度较高的区域。这是因为点密的区域被强调了,如图中的黑点所示,展现了其高斯分量。我们的方法(右列)成功地挖掘了稀疏区域的关键信息,得到了正确的配准结果。
本文提出了两种策略来估计点云密度:传感器模型法和直接经验法。传感器模型法通过建模Lidar传感器来估计采样分布,称作DARS。而经验法则不需要任何传感器先验信息而可直接应用于任意点云上,称为DARE。
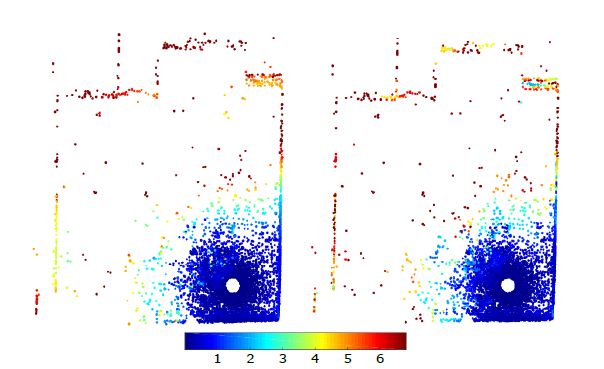
图二 用本文提出的基于传感器模型(左图)和经验方法(右图)计算得到的观测权的效果。在靠近Lidar的点密度较高部分被赋予低权值,而稀疏区域的影响权重则被增大。两种方法得到了相似的结果。主要的不同在于从密到疏的过渡区域。
实验部分主要与JRMPC与CPPSR两种基于概率的配准方法比较,首先在一合成场景下进行,再在两个具有挑战性的真实Lidar数据集上测试。
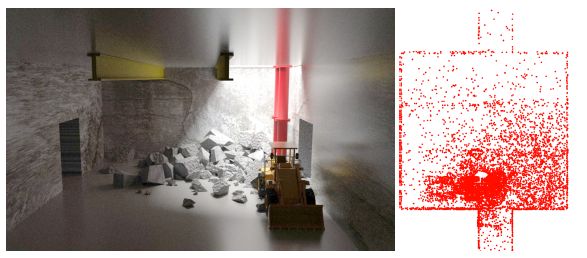
图三 合成3D场景测试集,左:场景的布置,右:变点密度点云重采样俯视图
在各测试集上,对于点云两两配准与多视角配准,本文提出的方法均显著优于两种参照算法JRMPC与CPPSR。

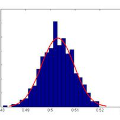
图四 召回率-角误差曲线 (a) 合成场景实验结果 本文提出的DARE方法与理论上界DAR-ideal十分接近 (b) 在VPS和TLS ETH混合数据集上的实验结果 各情况下,本文提出的DARE方法在JRMPC方法上有了显著的提升。

图五 VPS室内数据集中,四个点云的多视角配准
(a)CPPSR法仅配准了高点密度区域而忽视了稀疏区域3D结构 (b)本文提出的点密度适应性算法融合了颜色信息,成功完成多视配准

Abstract
Probabilistic methods for point set registration have demonstrated competitive results in recent years. These techniques estimate a probability distribution model of the point clouds. While such a representation has shown promise, it is highly sensitive to variations in the density of 3D points. This fundamental problem is primarily caused by changes in the sensor location across point sets. We revisit the foundations of the probabilistic registration paradigm. Contrary to previous works, we model the underlying structure of the scene as a latent probability distribution, and thereby induce invariance to point set density changes. Both the probabilistic model of the scene and the registration parameters are inferred by minimizing the Kullback-Leibler divergence in an Expectation Maximization based framework. Our density-adaptive registration successfully handles severe density variations commonly encountered in terrestrial Lidar applications. We perform extensive experiments on several challenging realworld Lidar datasets. The results demonstrate that our approach outperforms state-of-the-art probabilistic methods for multi-view registration, without the need of re-sampling.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
点击阅读原文,即可获取本文下载链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com