【泡泡一分钟】机器人顶级会议精华提炼(20190701-20190707)
每天一分钟,带你读遍机器人顶级会议文章
来源:计算机视觉和机器人顶级会议
播音员:水蘸墨,赵嘉珩
汇总:孙钦
编译:泡泡一分钟全体组员
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

2019年7月1日至2019年7月7日,泡泡一分钟共推送了10篇文章。其内容涉及到人体检测(2篇)、机器人设计(2篇)、姿态估计(1篇)、位姿估计(1篇)、语义分割(1篇)、SLAM框架(1篇)、导航系统(1篇)、场景定位(1篇)等。
人体检测
人体检测方面本周共推送2篇文章。
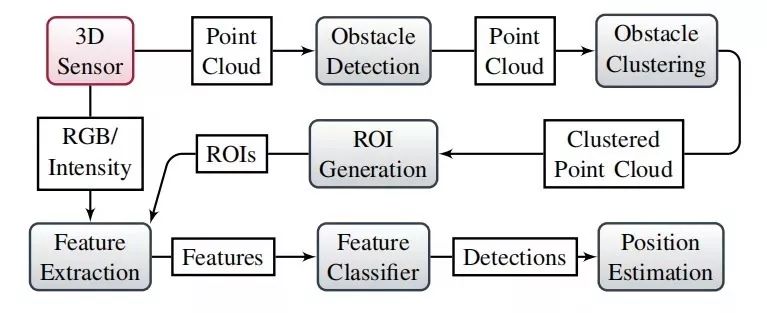
第一篇文章在实时的人体检测需要GPU或多核CPU才能实现的背景下,提出了一种轻量级的且能在单个CPU线程上运行的实时算法。该算法能够在室内和室外环境下实现鲁棒的3D人体检测。
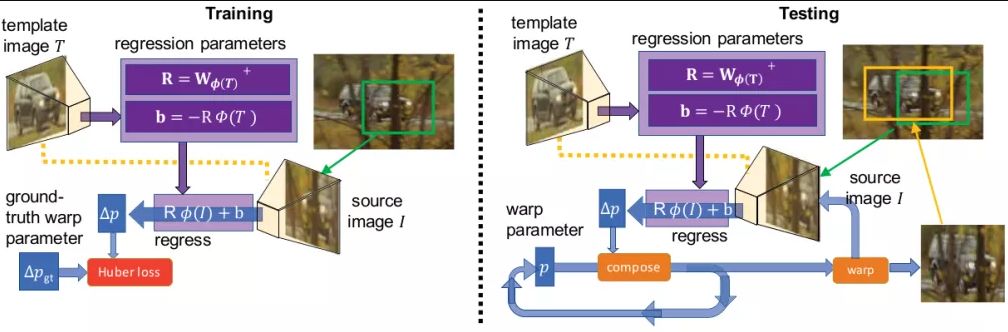
第二篇文章出了一种名为Deep-LK的有效的基于回归的目标跟踪方法。与最先进的基于回归的深度跟踪器GOTURN(Generic Object Tracking Using Regression Networks)相比,本文的Deep-LK方法对看不见的物体和视点表现出了很好的稳健性。
机器人设计
机器人设计方面本周共推送2篇文章。
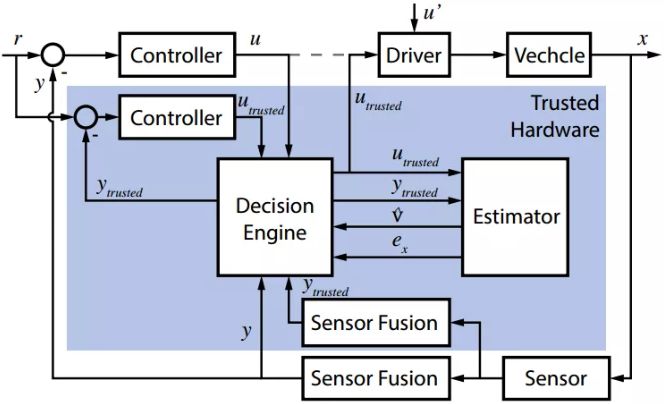
第一篇文章构建了一个名为BlueBox的用于检测和处理各种网络物理攻击的通用安全框架,作者通过在四轴飞行器中嵌入恶意代码等试验,证明了BlueBox能够检测各种网络物理攻击,并提供从此类攻击中恢复的方法。
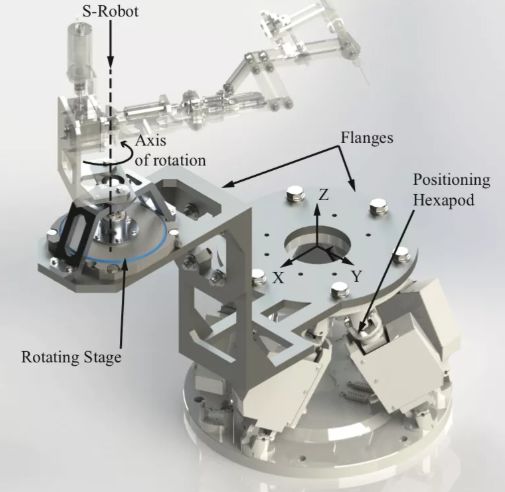
在第二篇文章中,作者为视网膜手术中的操作手术工具提供了一个针对机器人部件的严格运动学和动态分析,而且最终的模型可以移植到现有的操作器上。
姿态估计
姿态估计方面本周推送了1篇文章。
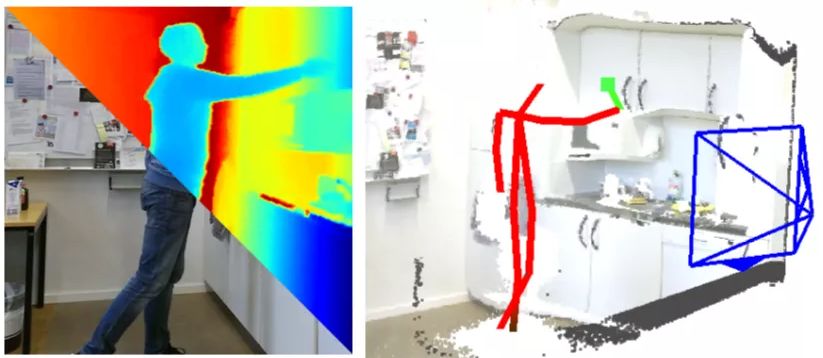
该文章提出了一种利用RGBD图像估计现实世界中三维人体姿态的方法,该方法在人体关键点检测器的基础上,结合了深度信息。且最终的实验表明,该算法能够使PR2机器人模仿人类教师的动作。
位姿估计
位姿估计方面本周推送了1篇文章。
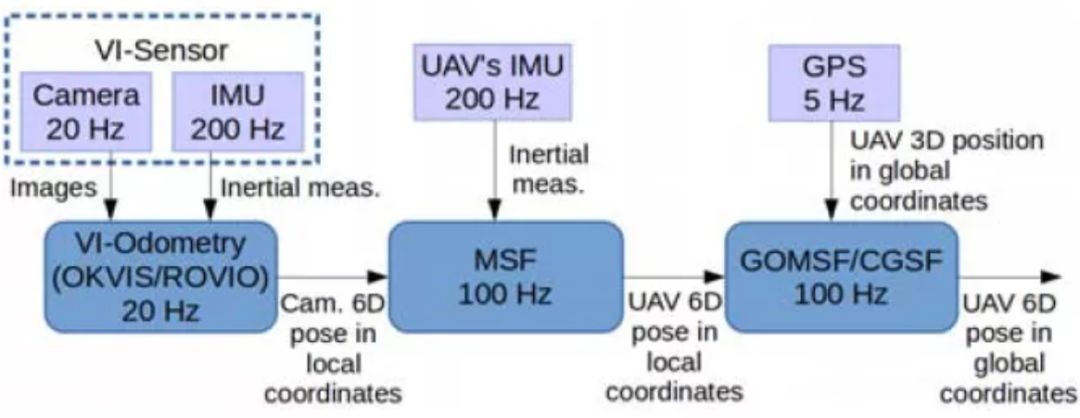
本文提出了一种基于多传感器融合的解耦图优化方法(GOMSF),该方法将融合问题视为局部视觉惯性里程计下的位姿和全局位置的实时对齐问题。对齐的坐标转换关系通过优化包含了最近几帧机器人状态的滑动窗口中的位姿图进行持续更新。同紧耦合以及融合了视觉、惯性测量单元和GPS测量的扩展卡尔曼滤波方法相比,本文的方法能在直接处理不同输入资源的情况下得到和紧耦合方法相当的结果。
语义分割
语义分割方面本周推送了1篇文章
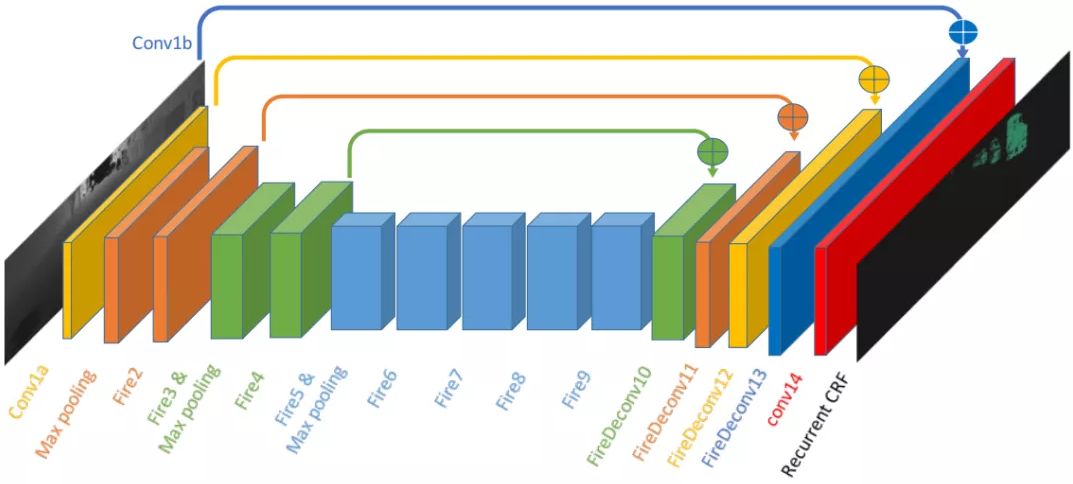
该文章提出了一个名为SqueezeSeg的端到端的网络结构,该网络结构将3D激光雷达点云中的道路物体的语义分割问题表述为一个逐点分类的问题。经过大量数据集的训练,SqueezeSeg方法具有精度高,稳定性好,速度快(8.7±0.5ms每帧)等优点,非常适合自动驾驶的应用。
SLAM框架
SLAM框架方面本周推送了1篇文章
这篇文章提出一种通用的SLAM算法,能够实现任意场景下的特征提取和匹配,而且作者还提出了一种能够识别具有良好约束的特征点的新方法,实现了可靠的重建。
导航系统
导航系统方面本周推送了1篇文章。
这篇文章利用一个新的无地图驾驶框架,结合全局导航的稀疏拓扑图和基于传感器的局部导航感知系统,解决了农村环境中的自主导航问题。

场景定位
场景定位方面本周推送了1篇文章
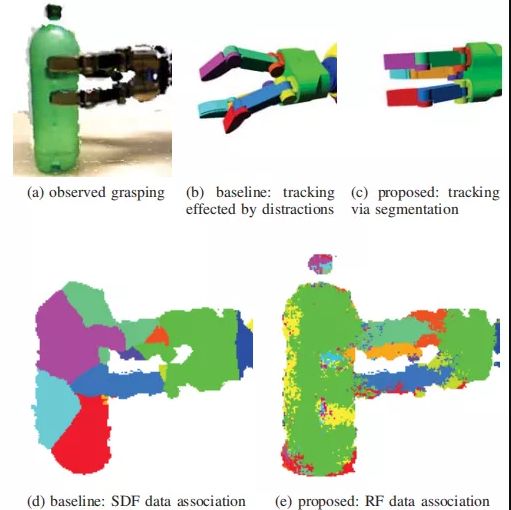
考虑到在机器人机械手抓取物体时的视觉跟踪问题中,当被抓物体和环境中的杂物造成视觉干扰时,跟踪容易失败的情况。本文作者提出用随机森林将每个像素数据关联到模型并通过人工遮挡训练随机森林,从而提高算法对场景中遮挡物体识别的鲁棒性。在RGB-D相机稠密深度数据集上的实验表明,本文的算法在抓取和有遮挡的情况下可以跟踪机器人的机械手。

如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com




