【泡泡一分钟】机器人顶级会议精华提炼(20190225-20190303)
每天一分钟,带你读遍机器人顶级会议文章
来源:计算机视觉和机器人顶级会议
播音员:水蘸墨
汇总:陈世浪,颜青松
编译:泡泡一分钟全体组员
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

2019年2月25日至2019年3月2日,泡泡一分钟共推送了10篇文章,其内容涉及到场景定位(2篇)、立体视觉(2篇)、SLAM框架(2篇)、视觉里程计(2篇)、语义SLAM(1篇)和后端优化(1篇)。
场景定位
本周介绍了2篇与定位相关的文章,分别从不同的角度尝试解决定位问题。
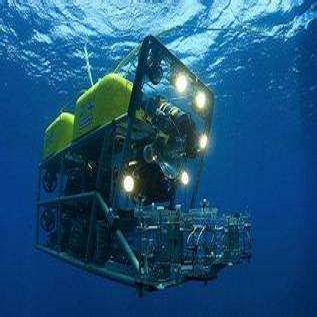
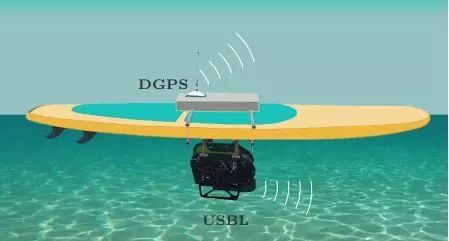
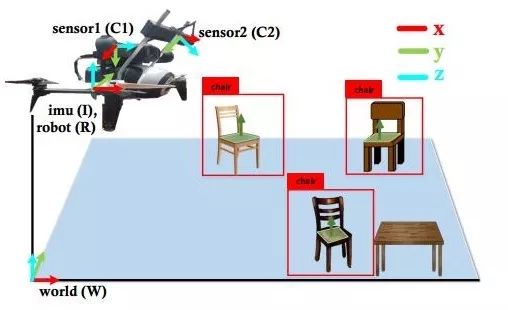
第一篇文章针对水下机器人,使用启发式模型来对多个定位信号进行自适应融合,从而完成机器人的定位。第二篇文章则针对室内环境,提出了一种基于立体视觉里程计(VO)和来自室内环境语义信息的微型空中机器人粒子滤波器定位方法。
立体视觉
立体视觉一直是研究的热点,本周推送了2篇与立体视觉相关的文章。
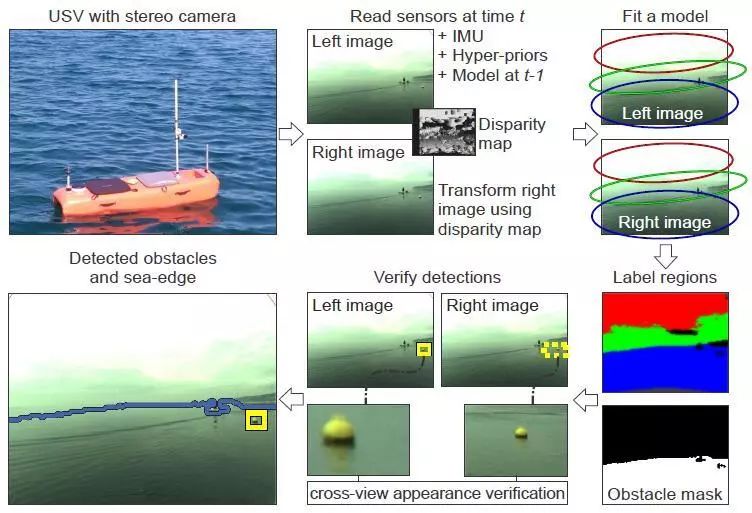
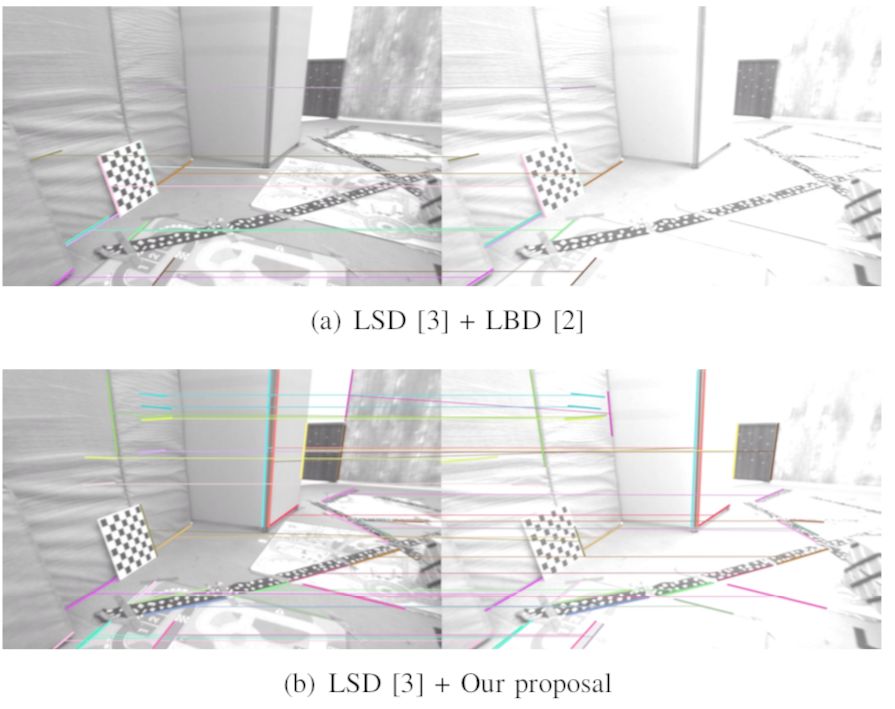
第一篇文章提出一种基于立体视图的无人艇障碍物检测方法,将障碍物检测问题转化为场景语义分割问题。第二篇文章提出了一种在严重亮度变化或者高动态范围环境下纯粹的基于几何的鲁棒性线段匹配方法。
SLAM框架
SLAM框架本周介绍了2篇文章,主要介绍的是两种特定环境下使用的SLAM框架。
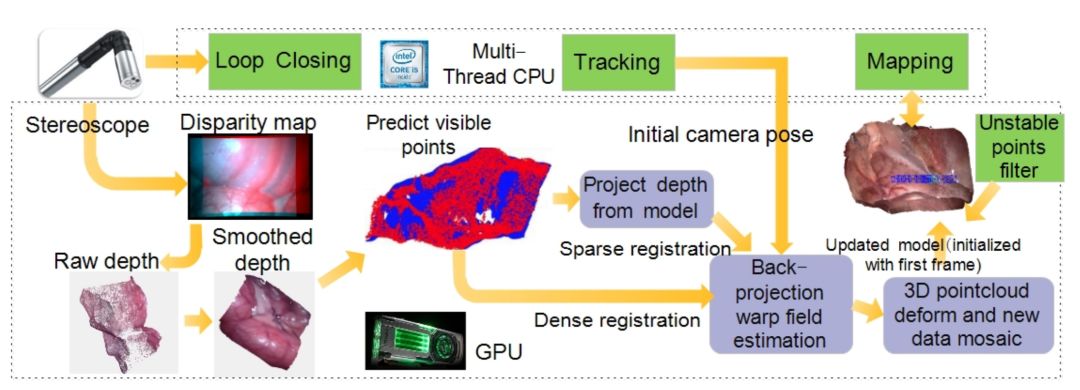
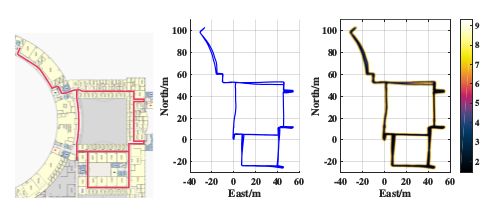
第一篇文章提出了MIS-SLAM方法,其是应用于立体镜微创手术(MIS)的完整的实时大规模稠密可变形SLAM系统,可以通过充分利用CPU和GPU实现异构计算。第二篇文章提出了一种低成本的室内建图和定位解决方案,该解决方案使用通过智能手机获得的室内环境信息。
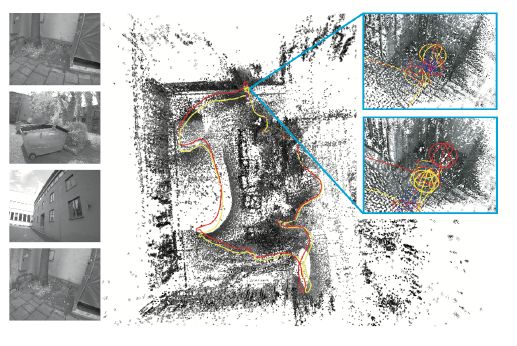
视觉里程计
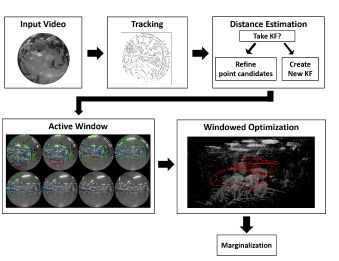
DSO是基于直接法的视觉里程计中的一个非常著名的方法。本周推送了2篇与DSO相关的文章,第一篇文章介绍了如何使用鱼眼拼接的全景上利用DSO进行视觉定位,第二篇文章则直接为DSO引入了回环机制,提高DSO算法的精度。
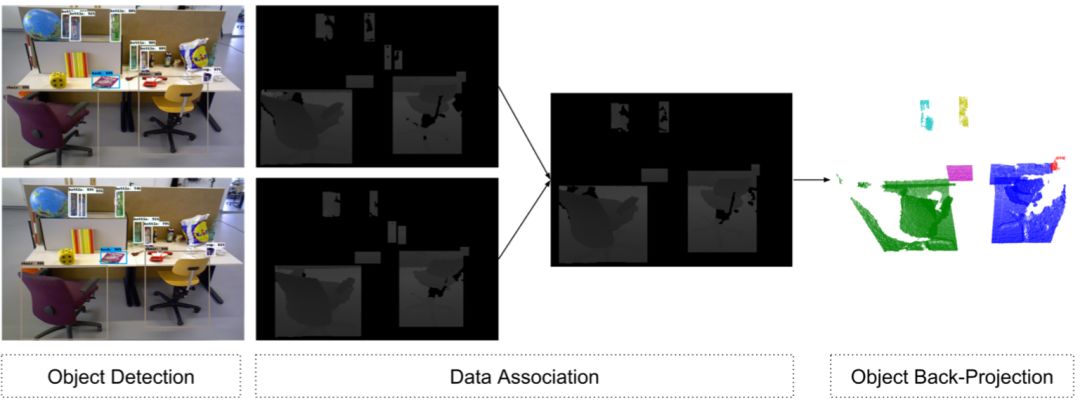
语义SLAM
语义SLAM近年来发展出的新方向,本周推送的文章中介绍了一种语义建图的方法,其首先使用目标检测检测物体,然后使用无参数的统计方法来进行连续帧数据关联。
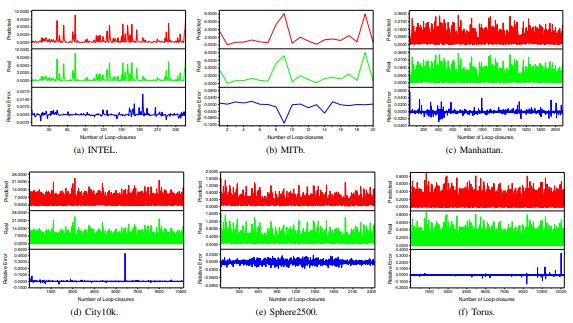
后端优化
强大的在线增量SLAM应用需要指标来评估当前测量的影响。本周推送的文章提出了一种基于预测函数变化的方法,能够用于在线决策或检测异常值。

如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com