【泡泡一分钟】机器人顶级会议精华提炼(20181105-20181111)
每天一分钟,带你读遍机器人顶级会议文章
来源:ECCV 2018
汇总:陈世浪,颜青松
编译:泡泡一分钟全体组员
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

2018年11月5日至2018年11月11日,泡泡一分钟共推送了12篇文章,其内容涉及三维重建(3篇)、立体视觉(2篇)、无人驾驶(1篇)、视觉定位(1篇)、语义分割(1篇)、相机标定(1篇)、SLAM框架(1篇)、地图构建(1篇)和时空定位与建图(1篇)等等各个方面的内容。
三维重建
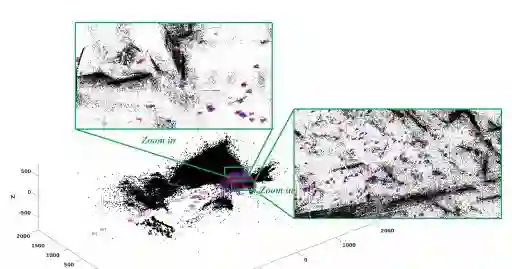
本周介绍了3篇三维重建的相关论文,第一篇文章介绍利用局部时间积分提高模型的精细化程度的方法,第二篇文章的主要内容是基于深度传感器的重建方法,最后一篇文章则重点关注了如何用点云进行城市场景建模。

利用局部时间积分方法进行多视图动态形状精细化
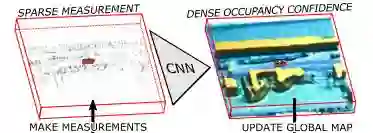
主动三维建图学习方法
一种利用点云数据建模城市场景的方法
立体视觉
本周立体视觉方面,首先介绍了一篇针对高镜面反射表明估计法线的方法,然后介绍了一篇基于感官一致性的立体算法。
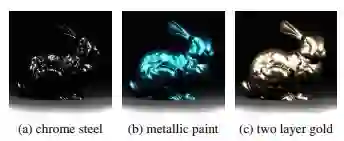
一种基于微腔的高镜面立体光度模型
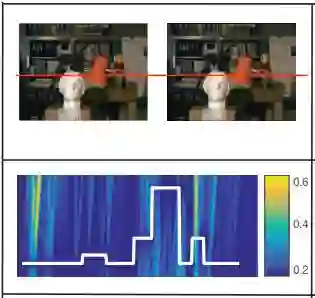
感官一致性的立体视觉:扫描线研究
视觉定位
视觉定位方面,本周介绍了一种基于城市级街景影像的视觉定位算法,其利用了被查图像以及街景影像的全局上下文信息来完成快速准确的定位定姿。
用于大规模3D地图中相机定位的高效全局2D-3D匹配方法
语义分割
语义分割本周介绍了一种新的密集对抗样本生成算法(DGA),将对抗性实例扩展到语义分割和目标检测。
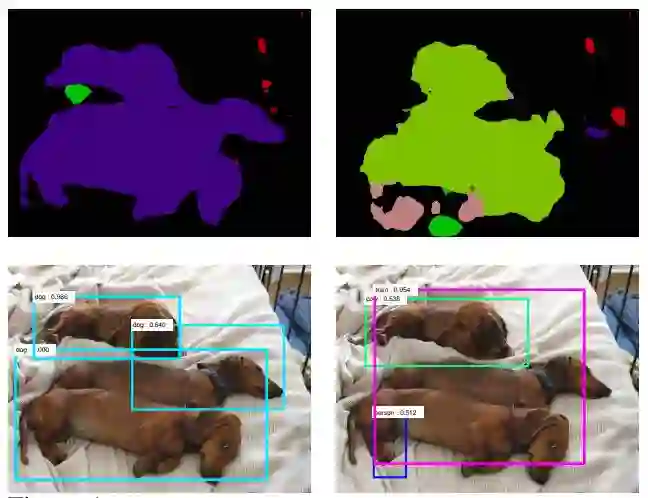
语义分割与目标检测的对抗性样本生成
相机标定
与常规的相机标定,本周介绍了一种不依赖于标定参数的相机标定方法,通过畸变改正图的方式来表示相机畸变情况。
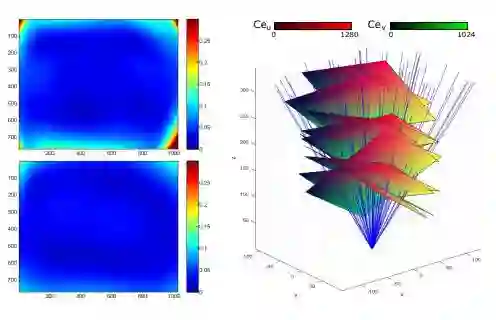
无参相机标定
SLAM框架
DSO是目前非常流行的直接法VO,本文介绍了一种基于双目的DSO算法。
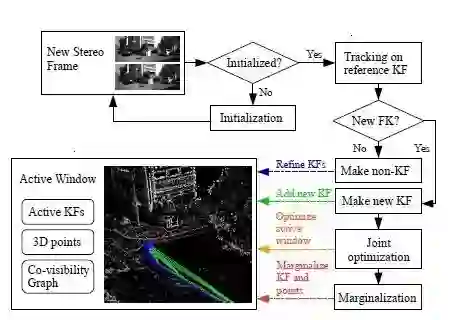
使用双目相机的大尺度直接稀疏视觉里程计—双目DSO
地图构建
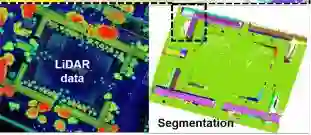
智能地图构建是今年来在测绘领域兴起的新兴研究热点,本周介绍了DeepRoadMapper,能够直接从航空影像中提取出具有拓扑信息的道路网。

DeepRoadMapper:从航空图像中提取道路拓扑
无人驾驶
本周在无人驾驶技术方面,介绍了一种通过挖掘识别技术(exploiting recognition)来解决这较大位移与局部模糊的3D运动估计问题。
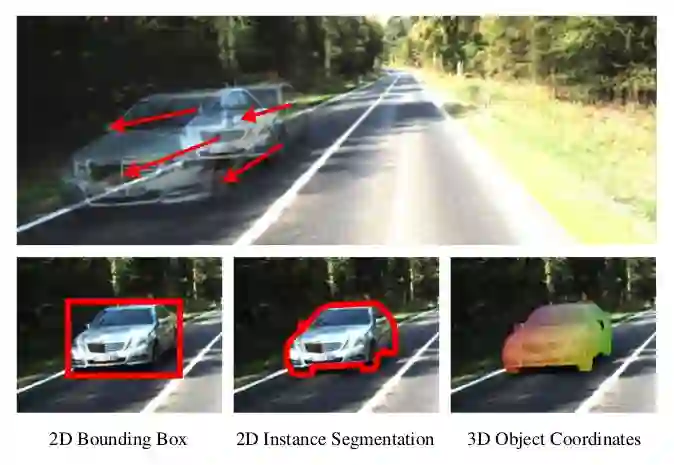
边界框,分割与目标坐标轴:论自动驾驶场景中识别对于3D场景流估计的重要性
时空定位与建图
最后,本周泡泡们还介绍了一种从带时间戳的数据流中构建世界时空模型的方法,其核心内容是动态元素随时间彼此独立出现,移动和消失的场景建图问题。
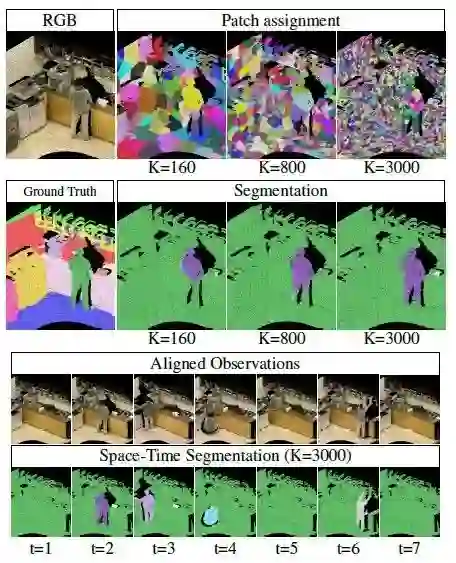
时空定位与建图

如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com