从相机标定到SLAM,极简三维视觉六小时课程视频(附PPT)
机器之心报道
参与:李亚洲、路
谭平教授是加拿大西蒙弗雷泽大学副教授。不久前他与浙江大学合作了一系列三维视觉课程,内容涵盖相机标定、多视几何等多个方面。机器之心简要介绍了该系列课程,希望能够对读者学习三维视觉技术有所帮助。
课程内容简介
任何把相机连接到计算机的工作都不能忽视三维视觉。近年来,视觉 SLAM 技术发展势头迅猛,AR/VR、无人机、机器人、自动驾驶方面的公司都在大量招聘了解这方面技术的人,但熟悉该领域的人才却非常稀缺。
谭平教授表示,2016 年他在北京筛选了近 200 份简历,最后只发出去两个 SLAM算法岗的 offer。许多人只是用过开源代码,有的对代码做过一些定制化,但对算法的原理了解很少。比如,很少有人能说清楚为什么 ORB SLAM 需要两种不同的初始化方式,也没有多少人能讲清楚旋转矩阵的参数化方式。
因此,谭平教授借在浙江大学讲课的机会,把三维视觉部分的课程录像发布在网络上,同时也共享了讲课的 PPT。
该课程一共是三周的课时,时长约六小时。内容涵盖相机标定、多视几何、structure-from-motion、SLAM 等方面。课程适合初学者或是想回顾基础知识的同学。
视频链接:http://list.youku.com/albumlist/show/id_52188378.html
PPT 资源链接:https://pan.baidu.com/s/1w_ucOJBou-Fi0Li7H_zaaw
提取码:oomy
下面我们将简单介绍其中的一节课 SLAM。
SLAM 技术
SLAM 的全称是 Simultaneous Localization And Mapping,是一种帮助机器人实现定位与地图构建功能的方案或技术。它早期用于军事核潜艇中的海底定位,现在广泛应用于机器人、无人机、自动驾驶、VR 和 AR 领域。
谭平教授主要从三部分介绍 SLAM 技术:基于激光雷达的 SLAM(LiDAR SLAM)、视觉 SLAM(Visual SLAM),以及提升稳健性的技术(Robustness Techniques)。谭教授希望首先通过 LiDAR SLAM 的讲解带大家了解 SLAM 的基础模块,然后了解如何用视觉方法实现这些基础模块,即实现 Visual SLAM,最后介绍 Visual SLAM 里面用于提升稳健性的常用技术。
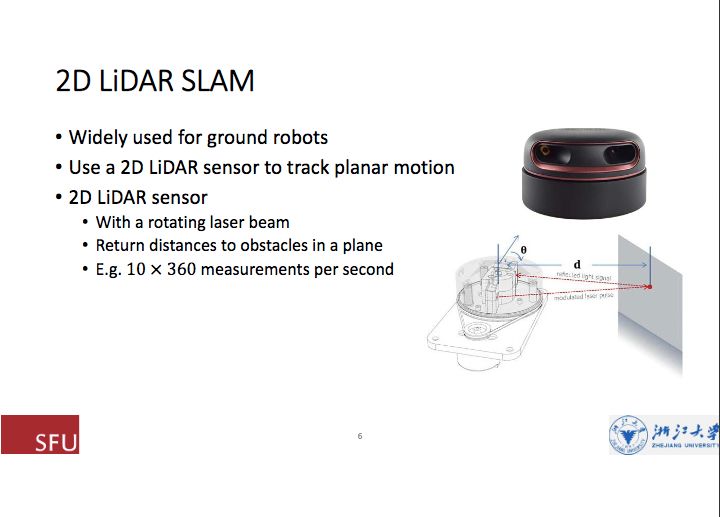
谭平教授首先简要介绍了 SLAM 的基础概念、视觉 SLAM 的 demo 及应用场景。之后以 2D LiDAR SLAM 为例,介绍了 SLAM 中的基础模块。
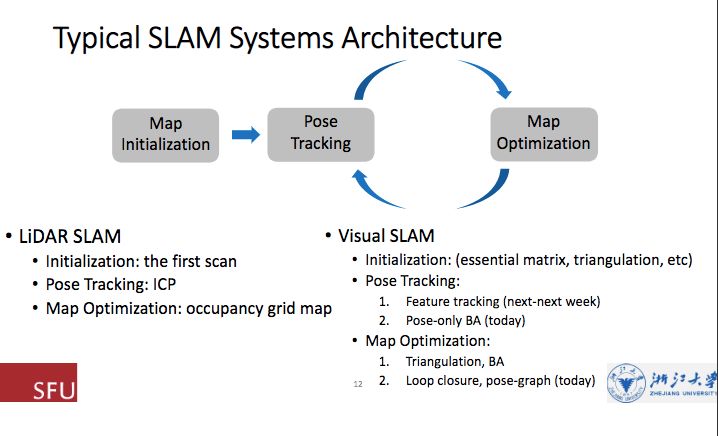
此外,谭平教授还介绍了 LiDAR SLAM 和 Visual SLAM 的基础架构。
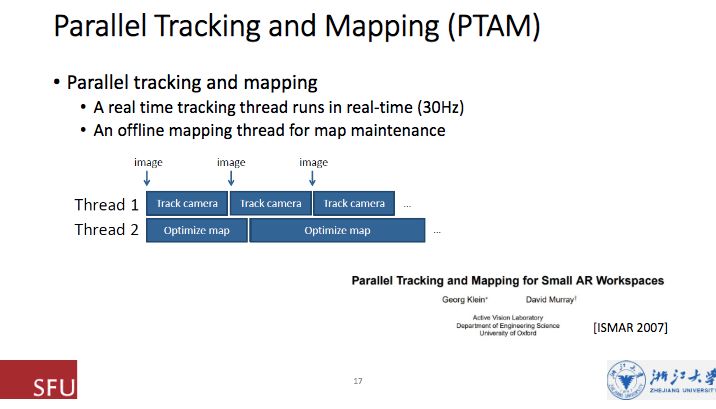
这节课的第二部分介绍了 Visual SLAM,主要探讨了 Visual SLAM by SfM(SfM 在前一节课中已经详细介绍过)、Key‐frame based VisualSLAM、Parallel Tracking and Mapping (PTAM)。其中重点介绍了 PTAM 的原理和具体步骤。
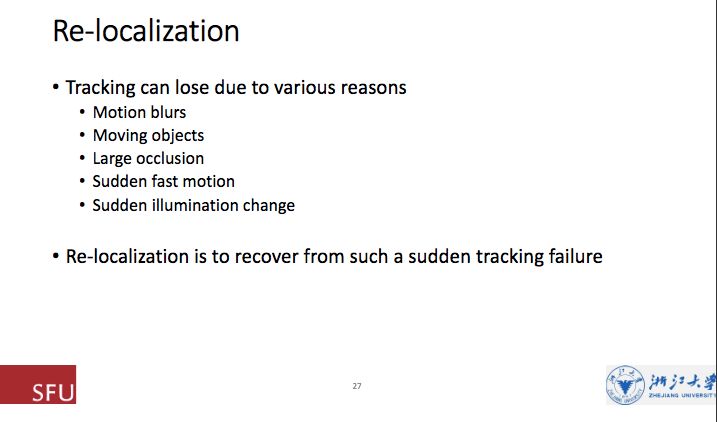
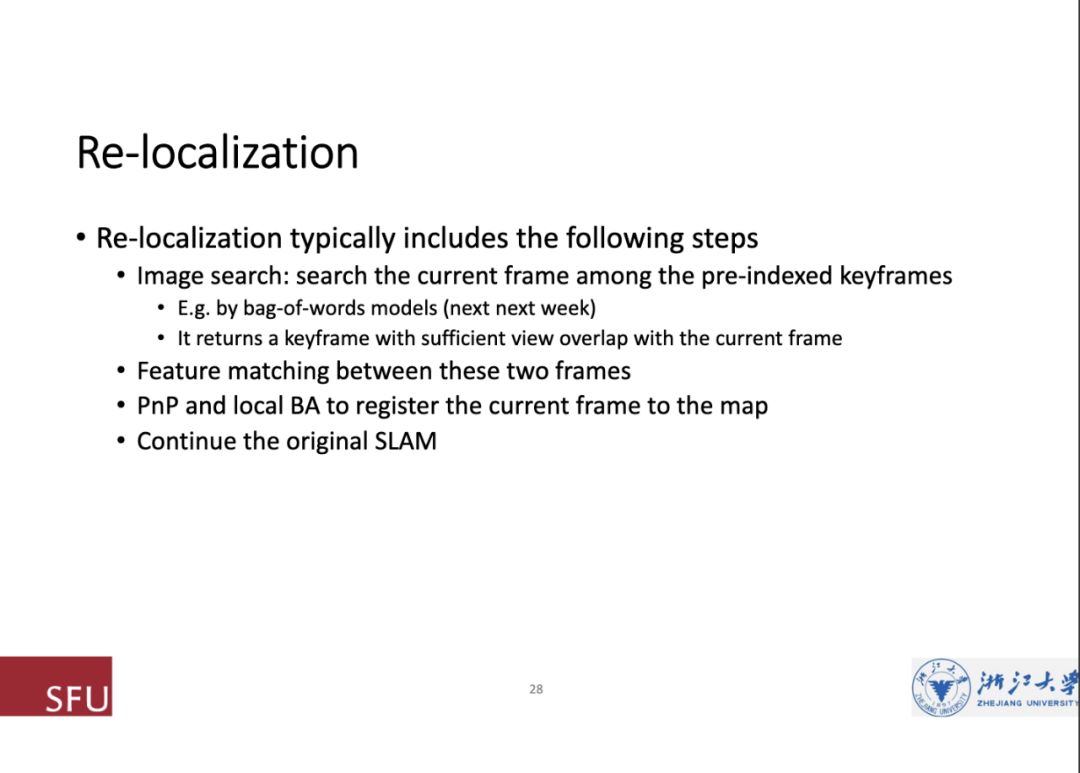
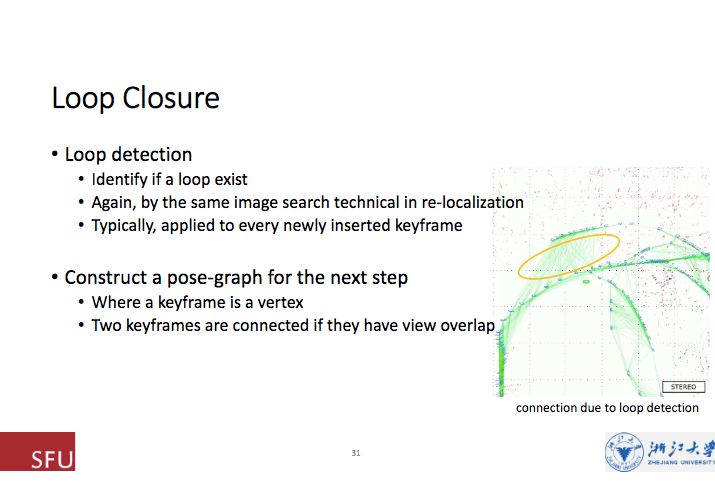
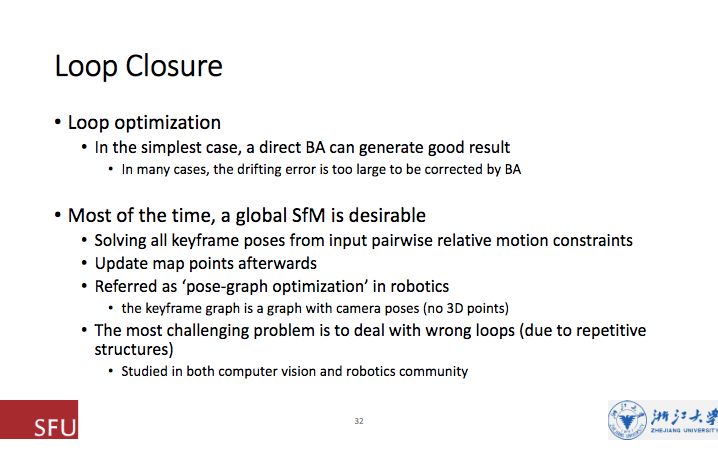
在这节课的第三部分,谭教授讲解了 Re‐localization、解决 Drifting 问题的 Loop Closure 等提升稳健性的技术。视觉 SLAM 面临很多挑战,因此需要这些高级功能来提升它的稳健性。
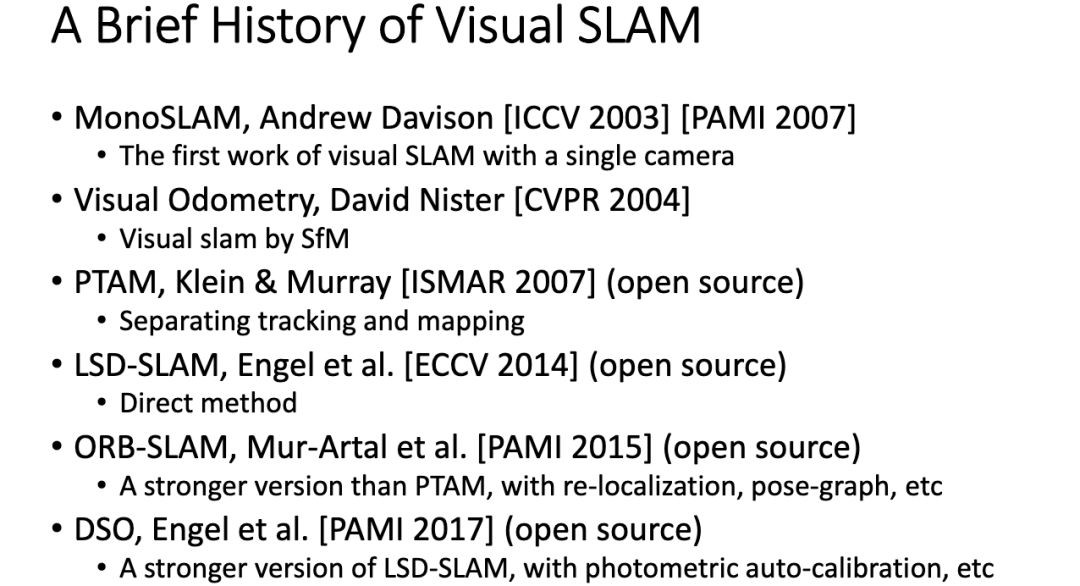
最后,谭教授简要回顾了视觉 SLAM 的历史,感兴趣的同学可查看课件中总结的研究。
讲师简介

谭平博士是加拿大西蒙弗雷泽大学 (SFU) 副教授,在此之前是新加坡国立大学 (NUS) 副教授。谭博士于 2007 年从香港科技大学获得博士学位,一直从事计算机视觉,特别是三维重建、视觉 SLAM 方面的研究工作。他是 IJCV、CGF、MVA 等学术杂志的副主编,并担任计算机视觉、图形学、机器人方面的学术会议领域主席,包括 CVPR 领域主席,SIGGRAPH、SIGGRAPH Asia 的程序委员,IROS 的副主编。

本文为机器之心报道,转载请联系本公众号获得授权。
✄------------------------------------------------
加入机器之心(全职记者 / 实习生):hr@jiqizhixin.com
投稿或寻求报道:content@jiqizhixin.com
广告 & 商务合作:bd@jiqizhixin.com