推荐|视觉SLAM漫淡:机器人即时定位与地图构建!
“全球人工智能”拥有十多万AI产业用户,10000多名AI技术专家。主要来自:北大,清华,中科院,麻省理工,卡内基梅隆,斯坦福,哈佛,牛津,剑桥...以及谷歌,腾讯,百度,脸谱,微软,阿里,海康威视,英伟达......等全球名校和名企。欢迎入驻《全球人工智能学院》!
作者:半闲居士
导读:开始做SLAM(机器人即时定位与建图)研究已经近一年了。从一年级开始对这个方向产生兴趣,到现在为止,也算是对这个领域有了大致的了解。然而越了解,越觉得这个方向难度很大。总体来讲有以下几个原因:
入门资料很少。虽然国内也有不少人在做,但这方面现在没有太好的入门教程。《SLAM for dummies》可以算是一篇。中文资料几乎没有。
SLAM研究已进行了三十多年,从上世纪的九十年代开始。其中又有若干历史分枝和争论,要把握它的走向就很费工夫。
难以实现。SLAM是一个完整的系统,由许多个分支模块组成。现在经典的方案是“图像前端,优化后端,闭环检测”的三部曲,很多文献看完了自己实现不出来。
自己动手编程需要学习大量的先决知识。首先你要会C和C++,网上很多代码还用了11标准的C++。第二要会用Linux。第三要会cmake,vim/emacs及一些编程工具。第四要会用openCV, PCL, Eigen等第三方库。只有学会了这些东西之后,你才能真正上手编一个SLAM系统。如果你要跑实际机器人,还要会ROS。
当然,困难多意味着收获也多,坎坷的道路才能锻炼人(比如说走着走着才发现Linux和C++才是我的真爱之类的。)鉴于目前网上关于视觉SLAM的资料极少,我于是想把自己这一年多的经验与大家分享一下。说的不对的地方请大家批评指正。
这篇文章关注视觉SLAM,专指用摄像机,Kinect等深度像机来做导航和探索,且主要关心室内部分。到目前为止,室内的视觉SLAM仍处于研究阶段,远未到实际应用的程度。一方面,编写和使用视觉SLAM需要大量的专业知识,算法的实时性未达到实用要求;另一方面,视觉SLAM生成的地图(多数是点云)还不能用来做机器人的路径规划,需要科研人员进一步的探索和研究。以下,我会介绍SLAM的历史、理论以及实现的方式,且主要介绍视觉(Kinect)的实现方式。
SLAM问题
SLAM,全称叫做Simultaneous Localization and Mapping,中文叫做同时定位与建图。啊不行,这么讲下去,这篇文章肯定没有人读,所以我们换一个讲法。
小萝卜的故事
从前,有一个机器人叫“小萝卜”。它长着一双乌黑发亮的大眼睛,叫做Kinect。有一天,它被邪恶的科学家关进了一间空屋子,里面放满了杂七杂八的东西。
小萝卜感到很害怕,因为这个地方他从来没来过,一点儿也不了解。让他感到害怕的主要是三个问题:
自己在哪里?
这是什么地方?
怎么离开这个地方?
在SLAM理论中,第一个问题称为定位 (Localization),第二个称为建图 (Mapping),第三个则是随后的路径规划。我们希望借助Kinect工具,帮小萝卜解决这个难题。各位同学有什么思路呢?
Kinect数据
要打败敌人,首先要了解你的武器。不错,我们先介绍一下Kinect。众所周知这是一款深度相机,你或许还听说过别的牌子,但Kinect的价格便宜,测量范围在3m-12m之间,精度约3cm,较适合于小萝卜这样的室内机器人。它采到的图像是这个样子的(从左往右依次为rgb图,深度图与点云图):

Kinect的一大优势在于能比较廉价地获得每个像素的深度值,不管是从时间上还是从经济上来说。OK,有了这些信息,小萝卜事实上可以知道它采集到的图片中,每一个点的3d位置。只要我们事先标定了Kinect,或者采用出厂的标定值。
我们把坐标系设成这个样子,这也是openCV中采用的默认坐标系。
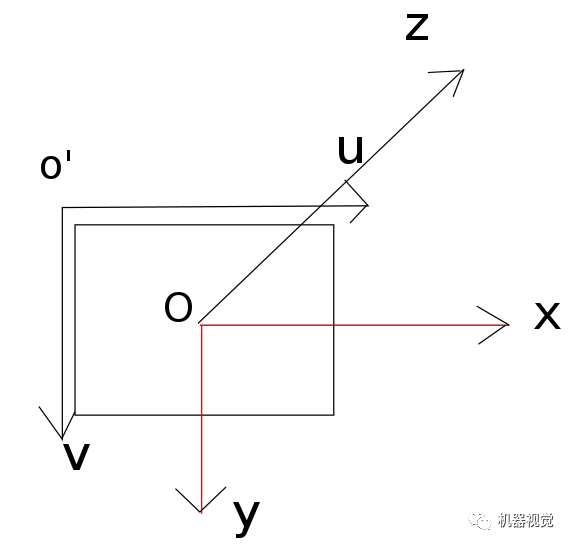
o’-uv是图片坐标系,o-xyz是Kinect的坐标系。假设图片中的点为(u,v),对应的三维点位置在(x,y,z),那么它们之间的转换关系是这样的:
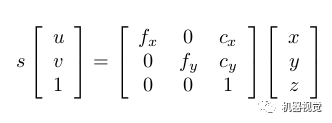
或者更简单的:
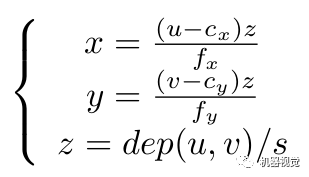
后一个公式给出了计算三维点的方法。先从深度图中读取深度数据(Kinect给的是16位无符号整数),除掉z方向的缩放因子,这样你就把一个整数变到了以米为单位的数据。然后,x,y用上面的公式算出。一点都不难,就是一个中心点位置和一个焦距而已。f代表焦距,c代表中心。如果你没有自己标定你的Kinect,也可以采用默认的值:s=5000, cx = 320, cy=240, fx=fy=525。实际值会有一点偏差,但不会太大。
定位问题
知道了Kinect中每个点的位置后,接下来我们要做的,就是根据两帧图像间的差别计算小萝卜的位移。比如下面两张图,后一张是在前一张之后1秒采集到的:
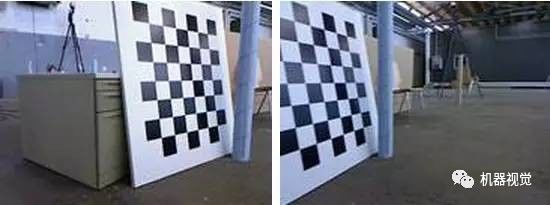
你肯定可以看出,小萝卜往右转过了一定的角度。但究竟转过多少度呢?这就要靠计算机来求解了。这个问题称为相机相对姿态估计,经典的算法是ICP(Iterative Closest Point,迭代最近点)。这个算法要求知道这两个图像间的一组匹配点,说的通俗点,就是左边图像哪些点和右边是一样的。你当然看见那块黑白相间的板子同时出现在两张图像中。在小萝卜看来,这里牵涉到两个简单的问题:特征点的提取和匹配。
如果你熟悉计算机视觉,那你应该听说过SIFT, SURF之类的特征。不错,要解决定位问题,首先要得到两张图像的一个匹配。匹配的基础是图像的特征,下图就是SIFT提取的关键点与匹配结果:

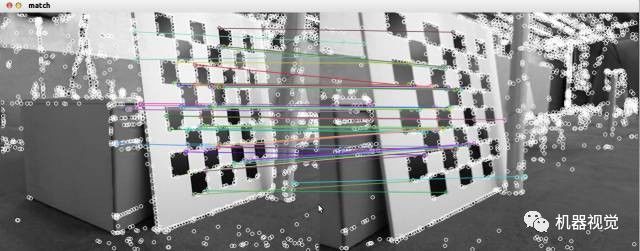
对实现代码感兴趣的同学请Google“opencv 匹配”即可,在openCV的教程上也有很明白的例子。上面的例子可以看出,我们找到了一些匹配,但其中有些是对的(基本平等的匹配线),有些是错的。这是由于图像中存在周期性出现的纹理(黑白块),所以容易搞错。但这并不是问题,在接下来的处理中我们会将这些影响消去。
得到了一组匹配点后,我们就可以计算两个图像间的转换关系,也叫PnP问题。它的模型是这样的:
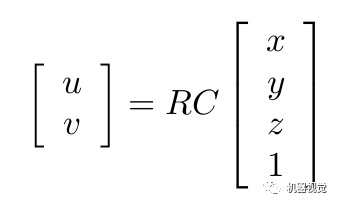
R为相机的姿态,C为相机的标定矩阵。R是不断运动的,而C则是随着相机做死的。ICP的模型稍有不同,但原理上也是计算相机的姿态矩阵。原则上,只要有四组匹配点,就可以算这个矩阵。你可以调用openCV的SolvePnPRANSAC函数或者PCL的ICP算法来求解。openCV提供的算法是RANSAC(Random Sample Consensus,随机采样一致性)架构,可以剔除错误匹配。所以代码实际运行时,可以很好地找到匹配点。以下是一个结果的示例。

上面两张图转过了16.63度,位移几乎没有。
有同学会说,那只要不断匹配下去,定位问题不就解决了吗?表面上看来,的确是这样的,只要我们引入一个关键帧的结构(发现位移超过一个固定值时,定义成一个关键帧)。然后,把新的图像与关键帧比较就行了。至于建图,就是把这些关键帧的点云拼起来,看着还有模有样,煞有介事的:

1-200帧的匹配结果
然而,如果事情真这么简单,SLAM理论就不用那么多人研究三十多年了(它是从上世纪90年代开始研究的)(上面讲的那些东西简直随便哪里找个小硕士就能做出来……)。那么,问题难在什么地方呢?
SLAM端优化理论
最麻烦的问题,就是“噪声”。这种渐近式的匹配方式,和那些惯性测量设备一样,存在着累积噪声。因为我们在不断地更新关键帧,把新图像与最近的关键帧比较,从而获得机器人的位移信息。但是你要想到,如果有一个关键帧出现了偏移,那么剩下的位移估计都会多出一个误差。这个误差还会累积,因为后面的估计都基于前面的机器人位置……哇!这后果简直不堪设想啊(例如,你的机器人往右转了30度,再往左转了30度回到原来的位置。然而由于误差,你算成了向右转29度,再向左转31度,这样你构建的地图中,会出现初始位置的两个“重影”)。我们能不能想办法消除这个该死的误差呢?
朋友们,这才是SLAM的研究,前面的可以说是“图像前端”的处理方法。我们的解决思路是:如果你和最近的关键帧相比,会导致累计误差。那么,我们最好是和更前面的关键帧相比,而且多比较几个帧,不要只比较一次。
我们用数学来描述这个问题。设:
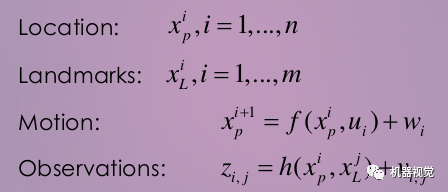
不要怕,只有借助数学才能把这个问题讲清楚。上面的公式中,xp是机器人小萝卜的位置,我们假定由n个帧组成。xL则是路标,在我们的图像处理过程中就是指SIFT提出来的关键点。如果你做2D SLAM,那么机器人位置就是x, y加一个转角theta。如果是3D SLAM,就是x,y,z加一个四元数姿态(或者rpy姿态)。这个过程叫做参数化(Parameterization)。
不管你用哪种参数,后面两个方程你都需要知道。前一个叫运动方程,描述机器人怎样运动。u是机器人的输入,w是噪声。这个方程最简单的形式,就是你能通过什么方式(码盘等)获得两帧间的位移差,那么这个方程就直接是上一帧与u相加即得。另外,你也可以完全不用惯性测量设备,这样我们就只依靠图像设备来估计,这也是可以的。
后一个方程叫观测方程,描述那些路标是怎么来的。你在第i帧看到了第j个路标,产生了一个测量值,就是图像中的横纵坐标。最后一项是噪声。偷偷告诉你,这个方程形式上和上一页的那个方程是一模一样的。
在求解SLAM问题前,我们要看到,我们拥有的数据是什么?在上面的模型里,我们知道的是运动信息u以及观测z。用示意图表示出来是这样的:
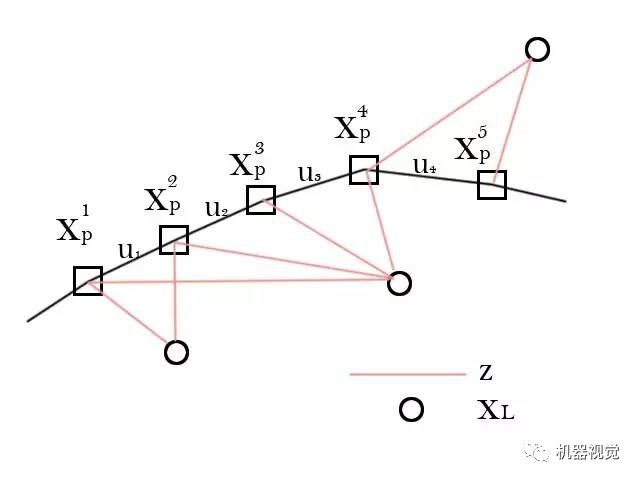
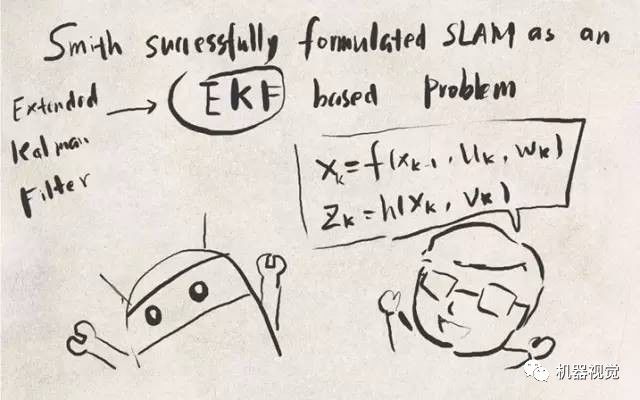
我们要求解的,就是根据这些u和z,确定所有的xp和xL。这就是SLAM问题的理论。从SLAM诞生开始科学家们就一直在解决这个问题。最初,我们用Kalman滤波器,所以上面的模型(运动方程和观测方程)被建成这个样子。直到21世纪初,卡尔曼滤波器仍在SLAM系统占据最主要的地位,Davison经典的单目SLAM就是用EKF做的。但是后来,出现了基于图优化的SLAM方法,渐渐有取而代之的地位[1]。我们在这里不介绍卡尔曼滤波器,有兴趣的同学可以在wiki上找卡尔曼滤波器,另有一篇中文的《卡尔曼滤波器介绍》也很棒。由于滤波器方法存储n个路标要消耗n平方的空间,在计算量上有点对不住大家。尽管08年有人提出分治法的滤波器能把复杂度弄到O(n) [2],但实现手段比较复杂。我们要介绍那种新兴的方法: Graph-based SLAM。
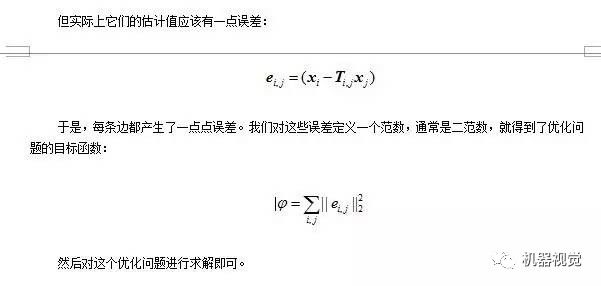
图优化方法把SLAM问题做成了一个优化问题。学过运筹学的同学应该明白,优化问题对我们有多么重要。我们不是要求解机器人的位置和路标位置吗?我们可以先做一个猜测,猜想它们大概在什么地方。这其实是不难的。然后呢,将猜测值与运动模型/观测模型给出的值相比较,可以算出误差:
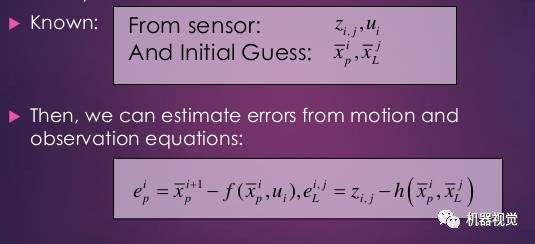
通俗一点地讲,例如,我猜机器人第一帧在(0,0,0),第二帧在(0,0,1)。但是u1告诉我机器人往z方向(前方)走了0.9米,那么运动方程就出现了0.1m的误差。同时,第一帧中机器人发现了路标1,它在该机器人图像的正中间;第二帧却发现它在中间偏右的位置。这时我们猜测机器人只是往前走,也是存在误差的。至于这个误差是多少,可以根据观测方程算出来。
我们得到了一堆误差,把这些误差平方后加起来(因为单纯的误差有正有负,然而平方误差可以改成其他的范数,只是平方更常用),就得到了平方误差和。我们把这个和记作phi,就是我们优化问题的目标函数。而优化变量就是那些个xp, xL。

改变优化变量,误差平方和(目标函数)就会相应地变大或变小,我们可以用数值方法求它们的梯度和二阶梯度矩阵,然后用梯度下降法求最优值。这些东西学过优化的同学都懂的。

注意到,一次机器人SLAM过程中,往往会有成千上万帧。而每一帧我们都有几百个关键点,一乘就是几百万个优化变量。这个规模的优化问题放到小萝卜的机载小破本上可解吗?是的,过去的同学都以为,Graph-based SLAM是无法计算的。但就在21世纪06,07年后,有些同学发现了,这个问题规模没有想象的那么大。上面的J和H两个矩阵是“稀疏矩阵”,于是呢,我们可以用稀疏代数的方法来解这个问题。“稀疏”的原因,在于每一个路标,往往不可能出现在所有运动过程中,通常只出现在一小部分图像里。正是这个稀疏性,使得优化思路成为了现实。
优化方法利用了所有可以用到的信息(称为full-SLAM, global SLAM),其精确度要比我们一开始讲的帧间匹配高很多。当然计算量也要高一些。
由于优化的稀疏性,人们喜欢用“图”来表达这个问题。所谓图,就是由节点和边组成的东西。我写成G={V,E},大家就明白了。V是优化变量节点,E表示运动/观测方程的约束。什么,更糊涂了吗?那我就上一张图,来自[3]。
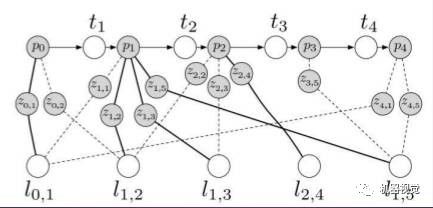
图有点模糊,而且数学符号和我用的不太一样,我用它来给大家一个图优化的直观形象。上图中,p是机器人位置,l是路标,z是观测,t是位移。其中呢,p, l是优化变量,而z,t是优化的约束。看起来是不是像一些弹簧连接了一些质点呢?因为每个路标不可能出现在每一帧中,所以这个图是蛮稀疏的。不过,“图”优化只是优化问题的一个表达形式,并不影响优化的含义。实际解起来时还是要用数值法找梯度的。这种思路在计算机视觉里,也叫做Bundle Adjustment。它的具体方法请参见一篇经典文章[4]。
不过,BA的实现方法太复杂,不太建议同学们拿C来写。好在2010年的ICRA上,其他的同学们提供了一个通用的开发包:g2o [5]。它是有图优化通用求解器,很好用,我改天再详细介绍这个软件包。总之,我们只要把观测和运动信息丢到求解器里就行。这个优化器会为我们求出机器人的轨迹和路标位置。如下图,红点是路标,蓝色箭头是机器人的位置和转角(2D SLAM)。细心的同学会发现它往右偏转了一些。:
闭环检测
上面提到,仅用帧间匹配最大的问题在于误差累积,图优化的方法可以有效地减少累计误差。然而,如果把所有测量都丢进g2o,计算量还是有点儿大的。根据我自己测试,约10000多条边,g2o跑起来就有些吃力了。这样,就有同学说,能把这个图构造地简洁一些吗?我们用不着所有的信息,只需要把有用的拿出来就行了。
事实上,小萝卜在探索房间时,经常会左转一下,右转一下。如果在某个时刻他回到了以前去过的地方,我们就直接与那时候采集的关键帧做比较,可以吗?我们说,可以,而且那是最好的方法。这个问题叫做闭环检测。
闭环检测是说,新来一张图像时,如何判断它以前是否在图像序列中出现过?有两种思路:一是根据我们估计的机器人位置,看是否与以前某个位置邻近;二是根据图像的外观,看它是否和以前关键帧相似。目前主流方法是后一种,因为很多科学家认为前一种依靠有噪声的位置来减少位置的噪声,有点循环论证的意思。后一种方法呢,本质上是个模式识别问题(非监督聚类,分类),常用的是Bag-of-Words (BOW)。但是BOW需要事先对字典进行训练,因此SLAM研究者仍在探讨有没有更合适的方法。
在Kinect SLAM经典大作中[6],作者采用了比较简单的闭环方法:在前面n个关键帧中随机采k个,与当前帧两两匹配。匹配上后认为出现闭环。这个真是相当的简单实用,效率也过得去。
高效的闭环检测是SLAM精确求解的基础。这方面还有很多工作可以做。
图优化理论与g2o的使用

l 已知的东西:传感器数据(图像,点云,惯性测量设备等)。我们的传感器主要是一个Kinect,因此数据就是一个视频序列,说的再详细点就是一个RGB位图序列与一个深度图序列。至于惯性测量设备,可以有也可以没有。
l 待求的东西:机器人的运动轨迹,地图的描述。运动轨迹,画出来应该就像是一条路径。而地图的描述,通常是点云的描述。但是点云描述是否可用于导航、规划等后续问题,还有待研究。
这两个点之间还是有挺长的路要走的。如果我们使用图优化,往往会在整个视频序列中,定义若干个关键帧:
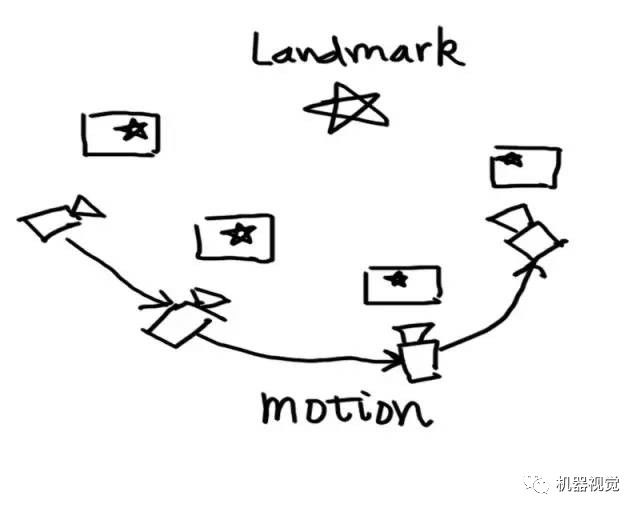
在这张图中,我们有一个路标点(五角星),并在各个关键帧中都看到了这个点。于是,我们就能用PnP或ICP求解相邻关键点的运动方向。这些在上篇文章都介绍过了,包括特征选择,匹配及计算等等。那么,这个过程中有什么问题呢?
为什么要用全局优化
你一定已经注意到,理想的计算总和实际有差距的。好比说理想的科研就是“看论文——产生想法——做实验——发文章”,那么现实的科研就是“看论文——产生想法——做实验——发现该想法在二十年前就有人做过了”,这样一个过程。实际当中,仅通过帧间运动(ego-motion)来计算机器人轨迹是远远不够的。如下图所示:
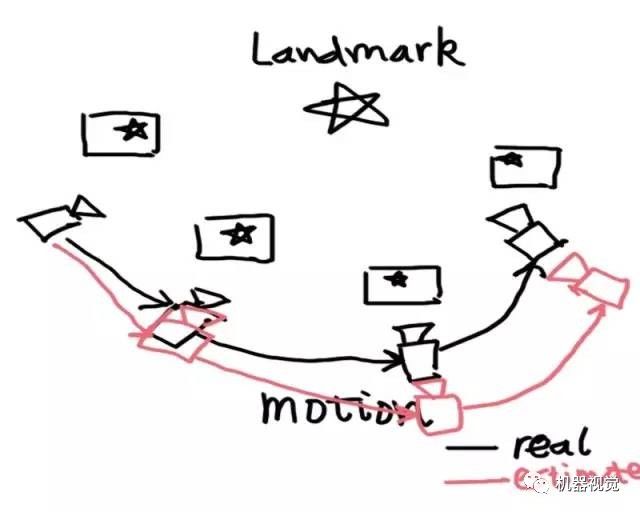
如果你只用帧间匹配,那么每一帧的误差将对后面所有的运动轨迹都要产生影响。例如第二帧往右偏了0.1,那么后面第三、四、五帧都要往右偏0.1,还要加上它们自己的估算误差。所以结果就是:当程序跑上十几秒之后早就不知道飞到哪儿去了。这是经典的SLAM现象,在EKF实现中,也会发现,当机器人不断运动时,不确定性会不断增长。当然不是我们所希望的结果。
那么怎么办才好呢?想象你到了一个陌生的城市,安全地走出了火车站,并在附近游荡了一会儿。当你走的越远,看到许多未知的建筑。你就越搞不清楚自己在什么地方。如果是你,你会怎么办?
通常的做法是认准一个标志性建筑物,在它周围转上几圈,弄清楚附近的环境。然后再一点点儿扩大我们走过的范围。在这个过程中,我们会时常回到之前已经见过的场景,因此对它周围的景象就会很熟悉。
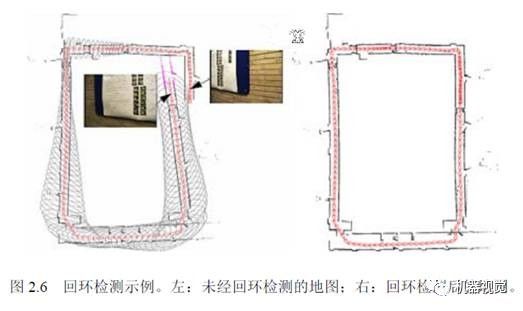
机器人的情形也差不多,除了大多数时候是人在遥控它行走。因而我们希望,机器人不要仅和它上一个帧进行比较,而是和更多先前的帧比较,找出其中的相似之处。这就是所谓的回环检测(Loop closure detection)。用下面的示意图来说明:
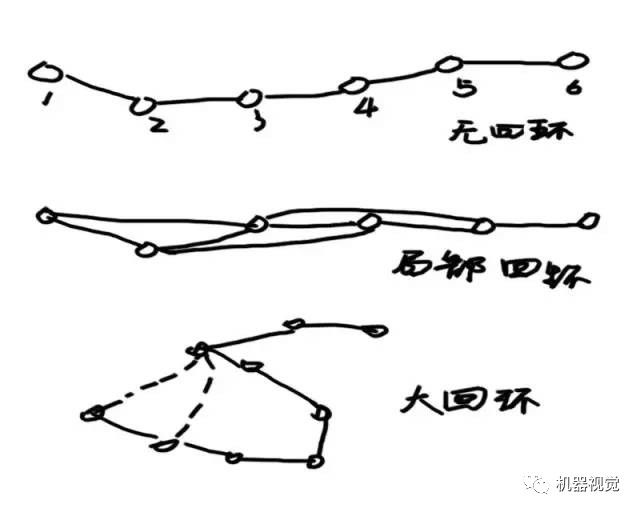
没有回环时,由于误差对后续帧产生影响,机器人路径估计很不稳定。加上一些局部回环,几个相邻帧就多了一些约束,因而误差就减少了。你可以把它看成一个由弹簧连起来的链条(质点-弹簧模型)。当机器人经过若干时间,回到最初地方时,检测出了大回环时,整个环内的结构都会变得稳定很多。我们就可以籍此知道一个房间是方的还是圆的,面前这堵墙对应着以前哪一堵墙,等等。
相信讲到这里,大家对回环检测都有了一个感性的认识。那么,这件事情具体是怎么建模,怎么计算,怎么编程呢?下面我们就一步步来介绍。
图优化的数学模型
SLAM问题的优化模型可以有几种不同的建模方式。我们挑选其中较简单的一种进行介绍,即FrameSLAM,在2008年提出。它的特点是只用位姿约束而不用特征约束,减少了很多计算量,表达起来也比较直观。下面我们给出一种6自由度的3D SLAM建模方法。
符号:
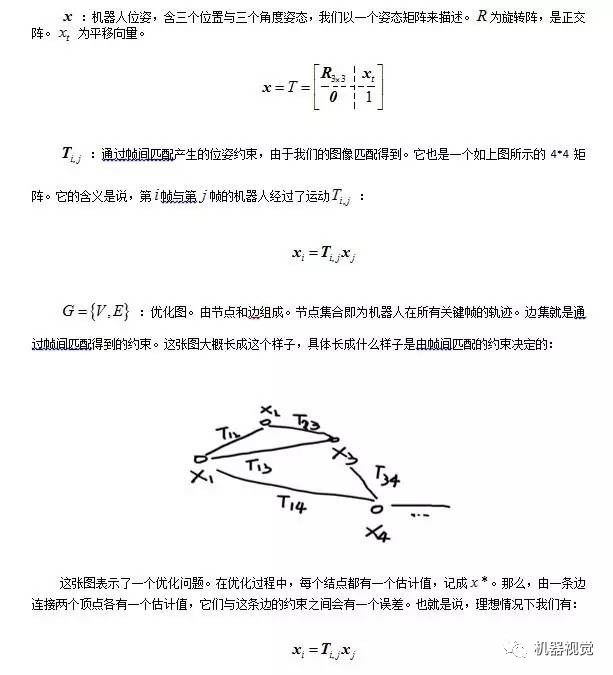
注意到这里的建模与前文有所不同,是一个简化版的模型。因为我们假设帧间匹配时得到了相邻帧的变换矩阵,而不是把所有特征也放到优化问题里面来。所以这个模型看上去相对简单。但是它很实用,因为不用引入特征,所以结点和边的数量大大减少,要知道在图像里提特征动辄成百上千的。
g2o是什么
g2o,就是对上述问题的一个求解器。它原理上是一个通用的求解器,并不限定于某些SLAM问题。你可以用它来求SLAM,也可以用ICP, PnP以及其他你能想到的可以用图来表达的优化问题。它的代码很规范,就是有一个缺点:文档太少。唯一的说明文档还有点太装叉(个人感觉)了,有点摆弄作者数学水平的意思,反正那篇文档很难懂就是了。话说程序文档不应该是告诉我怎么用才对么……
言归正传。如果你想用g2o,请去它的github上面下载:https://github.com/RainerKuemmerle/g2o
它的API在:http://www.rock-robotics.org/stable/api/slam/g2o/classg2o_1_1HyperGraph.html
安装
g2o是一个用cmake管理的C++工程,我是用Linux编译的,所以不要问我怎么在win下面用g2o,因为我也不会……不管怎么说,你下载了它的zip包或者用git拷下来之后,里面有一个README文件。告诉你它的依赖项。在ubuntu下,直接键入命令:
sudo apt-get install cmake libeigen3-dev libsuitesparse-dev libqt4-dev qt4-qmake libqglviewer-qt4-dev
我个人感觉还要 libcsparse-dev和freeglut3这两个库,反正多装了也无所谓。注意libqglviewer-qt4-dev只在ubuntu 12.04库里有,14.04 里换成另一个库了。g2o的可视化工具g2o_viewer是依赖这个库的,所以,如果你在14.04下面编,要么是去把12.04那个deb(以及它的依赖项)找出来装好,要么用ccmake,把build apps一项给去掉,这样就不编译这个工具了。否则编译过不去。
解开zip后,新建一个build文件夹,然后就是:
cmake ..
make
sudo make install
这样g2o就装到了你的/usr/local/lib和/usr/local/include下面。你可以到这两个地方去看它的库文件与头文件。
学习g2o的使用
因为g2o的文档真的很装叉(不能忍),所以建议你直接看它的源代码,耐心看,应该比文档好懂些。它的example文档夹下有一些示例代码,其中有一个tutorial_slam2d文件夹下有2d slam仿真的一个程序。值得仔细阅读。
使用g2o来实现图优化还是比较容易的。它帮你把节点和边的类型都定义好了,基本上只需使用它内置的类型而不需自己重新定义。要构造一个图,要做以下几件事:
l定义一个SparseOptimizer. 编写方式参见tutorial_slam2d的声明方式。你还要写明它使用的算法。通常是Gauss-Newton或LM算法。个人觉得后者更好一些。
定义你要用到的边、节点的类型。例如我们实现一个3D SLAM。那么就要看它的g2o/types/slam3d下面的头文件。节点头文件都以vertex_开头,而边则以edge_开头。在我们上面的模型中,可以选择vertex_se3作为节点,edge_se3作为边。这两个类型的节点和边的数据都可以直接来自于Eigen::Isometry,即上面讲到过的变换矩阵T。
编写一个帧间匹配程序,通过两张图像算出变换矩阵。这个用opencv, pcl都可以做。
把你得到的关键帧作为节点,变换矩阵作为边,加入到optimizer中。同时设定节点的估计值(如果没有惯性测量就设成零)与边的约束(变换矩阵)。此外,每条边还需设定一个信息矩阵(协方差矩阵之逆)作为不确定性的度量。例如你觉得帧间匹配精度在0.1m,那么把信息矩阵设成100的对角阵即可。
在程序运行过程中不断作帧间检测,维护你的图。
程序结束时调用optimizer.optimize( steps )进行优化。优化完毕后读取每个节点的估计值,此时就是优化后的机器人轨迹。
代码这种东西展开来说会变得像字典一样枯燥,所以具体的东西需要大家自己去看,自己去体会。这里有我自己写的一个程序,可以供大家参考。不过这个程序需要带着数据集才能跑,学习g2o的同学只需参考里面代码的写法即可:https://github.com/gaoxiang12/slam3d_gx
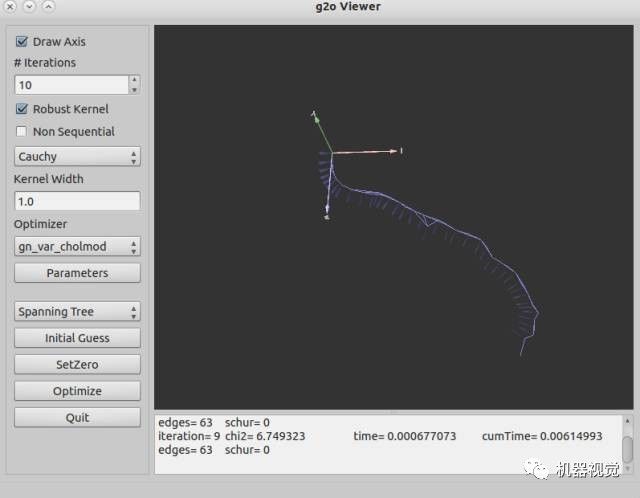
请输入标题
最近我跑了几个公开数据集(http://vision.in.tum.de/data/datasets/rgbd-dataset)上的例子(fr1_desk, fr2_slam)(,感觉效果还不错。有些数据集还是挺难的。最后一张图是g2o_viewer,可以看到那些关键路径点与边的样子。


研究点介绍

在《SLAM for Dummy》中,有一句话说的好:"SLAM并不是一种算法,而是一个概念。(SLAM is more like a concept than a single algorithm.)"所以,你可以和导师、师兄弟(以及师妹,如果有的话)说你在研究SLAM,但是,作为同行,我可能更关心:你在研究SLAM中的哪一个问题。有些研究者专注于实现一个具体的SLAM系统,而更多的人则是在研究SLAM里某些方法的改进。做应用和做理论的人往往彼此看不起,不过二者对科研都是有贡献的。作为研究生,我还是建议各位抓住SLAM中一个小问题,看看能否对现有的算法进行改进或者比较。不要觉得这种事情肤浅,它是对研究有实际帮助和意义的。同时,我也有一些朋友,做了一个基于滤波器/图优化的SLAM实现。程序是跑起来了,但他/她不知道自己有哪些贡献,钻研了哪个问题,写论文的时候就很头疼。所以,作为研究生,我建议你选择SLAM中的一个问题,改进其中的算法,而不是先找一堆程序跑起来再说。
那么问题来了:SLAM方面究竟有哪些可以研究的地方呢?我为大家上一个脑图。
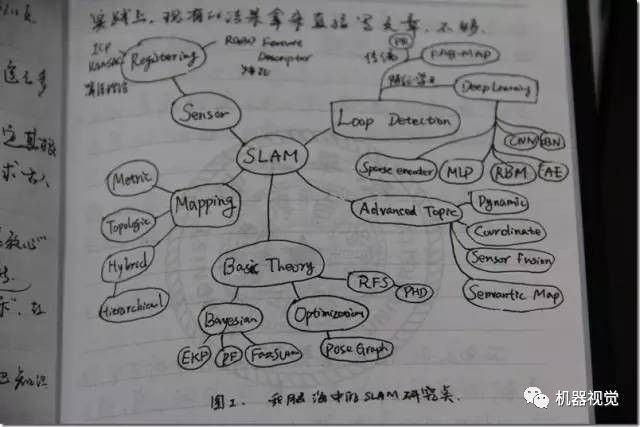
这个图是从我笔记本上拍下来的(请勿吐槽字和对焦)。可以看到,以SLAM为中心,有五个圈连接到它。我称它为Basic Theory(基础理论)、Sensor(传感器)、Mapping(建图)、Loop Detection(回环检测)、Advanced Topic(高级问题)。这可以说是SLAM的研究方向。下面我们"花开五朵,各表一枝"。
基本理论
SLAM的基本理论,是指它的数学建模。也就是你如何用数学模型来表达这个问题。为什么说它"基本"呢?因为数学模型影响着整个系统的性能,决定了其他问题的处理方法。在早先的研究中(86年提出[1]至21世纪前期[2]),是使用卡尔曼滤波器的数学模型的。那里的机器人,就是一个位姿的时间序列;而地图,就是一堆路标点的集合。什么是路标点的集合?就是用(x,y,z)表示每一个路标,然后在滤波器更新的过程中,让这三个数慢慢收敛。
那么,请问这样的模型好不好?
好处是可以直接套用滤波器的求解方法。卡尔曼滤波器是很成熟的理论,比较靠谱。
缺点呢?首先,滤波器有什么缺点,基于它的SLAM就有什么缺点。所以EKF的线性化假设啊,必须存储协方差矩阵带来的资源消耗啊,都成了缺点(之后的文章里会介绍)。然后呢,最直观的就是,用(x,y,z)表示路标?万一路标变了怎么办?平时我们不就把屋里的桌子椅子挪来挪去的吗?那时候滤波器就挂了。所以啊,它也不适用于动态的场合。
这种局限性就是数学模型本身带来的,和其他的算法无关。如果你希望在动态环境中跑SLAM,就要使用其他模型或改进现有的模型了。
SLAM的基本理论,向来分为滤波器和优化方法两类。滤波器有扩展卡尔曼滤波(EKF)、粒子滤波(PF),FastSLAM等,较早出现。而优化方向用姿态图(Pose Graph),其思想在先前的文章中介绍过。近年来用优化的逐渐增多,而滤波器方面则在13年出现了基于Random Finite Set的方法[3],也是一个新兴的浪潮[4]。关于这些方法的详细内容,我们在今后的文章中再进行讨论。
作为SLAM的研究人员,应该对各种基本理论以及优缺点有一个大致的了解,尽管它们的实现可能非常复杂。
传感器
传感器是机器人感知世界的方式。传感器的选择和安装方式,决定了观测方程的具体形式,也在很大程度上影响着SLAM问题的难度。早期的SLAM多使用激光传感器(Laser Range Finder),而现在则多使用视觉相机、深度相机、声呐(水下)以及传感器融合。我觉得该方向可供研究点有如下几个:
如何使用新兴传感器进行SLAM。 要知道传感器在不断发展,总有新式的东西会出来,所以这方面研究肯定不会断。
不同的安装方式对SLAM的影响。 举例来说,比如相机,顶视(看天花板)和下视(看地板)的SLAM问题要比平视容易很多。为什么容易呢?因为顶/下视的数据非常稳定,不像平视,要受各种东西的干扰。当然,你也可以研究其他的安装方式。
改进传统传感器的数据处理。这部分就有些困难了,因为经常传感器已经有很多人在使用,你做的改进,未必比现有的成熟方法更好。
建图
建图,顾名思议,就是如何画地图呗。其实,如果知道了机器人的真实轨迹,画地图是很简单的一件事。不过,地图的具体形式也是研究点之一。比如说常见的有以下几种:
路标地图
地图由一堆路标点组成。EKF中的地图就是这样的。但是,也有人说,这真的是地图吗(这些零零碎碎的点都是什么啊喂)?所以路标图尽管很方便,但多数人对这种地图是不满意的,至少看上去不像个地图啊。于是就有了密集型地图(Dense map)。
度量地图(Metric map)
通常指2D/3D的网格地图,也就是大家经常见的那种黑白的/点云式地图。点云地图比较酷炫,很有种高科技的感觉。它的优点是精度比较高,比如2D地图可以用0-1表示某个点是否可通过,对导航很有用。缺点是相当吃存储空间,特别是3D,把所有空间点都存起来了,然而大多数角角落落里的点除了好看之外都没什么意义……

拓扑地图(Topological map)
拓扑地图是比度量地图更紧凑的一种地图。它将地图抽象为图论中的"点"和"边",使之更符合人类的思维。比如说我要去五道口,不知道路,去问别人。那人肯定不会说,你先往前走621米,向左拐94.2度,再走1035米……(这是疯子吧)。正常人肯定会说,往前走到第二个十字路口,左拐,走到下一个红绿灯,等等。这就是拓扑地图。
混合地图
既然有人要分类,就肯定有人想把各类的好处揉到一起。这个就不多说了吧。
回环检测
回环检测,又称闭环检测(Loop closure detection),是指机器人识别曾到达场景的能力。如果检测成功,可以显著地减小累积误差。
回环检测目前多采用词袋模型(Bag-of-Word),研究计算机视觉的同学肯定不会陌生。它实质上是一个检测观测数据相似性的问题。在词袋模型中,我们提取每张图像中的特征,把它们的特征向量(deor)进行聚类,建立类别数据库。比如说,眼睛、鼻子、耳朵、嘴等等(实际当中没那么高级,基本上是一些边缘和角)。假设有10000个类吧。然后,对于每一个图像,可以分析它含有数据库中哪几个类。以1表示有,以0表示没有。那么,这个图像就可用10000维的一个向量来表达。而不同的图像,只要比较它们的向量即可。
回环检测也可以建成一个模型识别问题,所以你也可以使用各种机器学习的方法来做,比如什么决策树/SVM,也可以试试Deep Learning。不过实际当中要求实时检测,没有那么多时间让你训练分类器。所以SLAM更侧重在线的学习方法。
高级话题
前面的都是基础的SLAM,只有"定位"和"建图"两件事。这两件事在今天已经做的比较完善了。近几年的RGB-D SLAM[5], SVO[6], Kinect Fusion[7]等等,都已经做出了十分炫的效果。但是SLAM还未走进人们的实际生活。为什么呢?
因为实际环境往往非常复杂。灯光会变,太阳东升西落,不断的有人从门里面进进出出,并不是一间安安静静的空屋子,让一个机器人以2cm/s的速度慢慢逛。论文中看起来酷炫的算法,在实际环境中往往捉襟见肘,处处碰壁。向实际环境挑战,是SLAM技术的主要发展方向,也就是我们所说的高级话题。主要有:动态场景、语义地图、多机器人协作等等。
最后,让我们想象一下未来SLAM的样子吧:
有一天,小萝卜被领进了一家新的实验楼。在短暂的自我介绍之后,他飞快地在楼里逛了一圈,记住了哪里是走廊,哪儿是房间。他刻意地观察各个房间特有的物品,以便区分这些看起来很相似的房间。然后,他回到了科学家身边,协助他的研究。有时,科学家会让他去各个屋里找人,找资料,有时,也带着他去认识新安装的仪器和设备。在闲着没事时,小萝卜也会在楼里逛逛,看看那些屋里都有什么变化。每当新的参观人员到来,小萝卜会给他们看楼里的平面图,向他们介绍各个楼层的方位与状况,为他们导航。大家都很喜欢小萝卜。而小萝卜明白,这一切,都是过去几十年里SLAM研究人员不断探索的结果。
[1]. Smith, R.C. and P. Cheeseman, On the Representation and Estimation of Spatial Uncertainty. International Journal of Robotics Research, 1986. 5(4): p. 56--68.
[2]. Se, S., D. Lowe and J. Little, Mobile robot localization and mapping with uncertainty using scale-invariant visual landmarks. The international Journal of robotics Research, 2002. 21(8): p. 735--758.
[3]. Mullane, J., et al., A Random-Finite-Set Approach to Bayesian SLAM. IEEE Transactions on Robotics, 2011.
[4]. Adams, M., et al., SLAM Gets a PHD: New Concepts in Map Estimation. IEEE Robotics Automation Magazine, 2014. 21(2): p. 26--37.
[5]. Endres, F., et al., 3-D Mapping With an RGB-D Camera. IEEE Transactions on Robotics, 2014. 30(1): p. 177--187.
[6]. Forster, C., M. Pizzoli and D. Scaramuzza, SVO: Fast semi-direct monocular visual odometry. 2014, IEEE. p. 15--22.
[7]. Newcombe, R.A., et al., KinectFusion: Real-time dense surface mapping and tracking. 2011, IEEE. p. 127--136.
即时定位与地图构建(SLAM)的相关研究
即时定位与地图构建(SimultaneousLocalization AndMapping)指的是机器人在自身位置不确定的条件下,在完全未知环境中创建地图,同时利用地图进行自主定位和导航。
SLAM问题可以描述为:机器人在未知环境中从一个未知位置开始移动,在移动过程中根据位置估计和传感器数据进行自身定位,同时建造增量式地图。
(1)定位(localization):机器人必须知道自己在环境中位置。
(2)建图(mapping):机器人必须记录环境中特征的位置(如果知道自己的位置)
(3)SLAM:机器人在定位的同时建立环境地图。其基本原理是运过概率统计的方法,通过多特征匹配来达到定位和减少定位误差的。
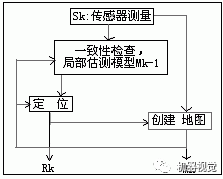
图 SLAM的基本过程
移动机器人自定位与环境建模问题是紧密相关的。环境模型的准确性依赖于定位精度,而定位的实现又离不开环境模型。在未知环境中,机器人没有什么参照物,只能依靠自己并不十分准确的传感器来获取外界信息,如同一个盲人在一个陌生环境中摸索的情况。这种情况下,定位是比较困难的。有地图的定位和有定位的地图创建都是容易解决的,但无地图的定位和未解决定位的地图创建如同"鸡--蛋"问题,无从下手。已有的研究中对这类问题的解决方法可分为两类:一类利用自身携带的多种内部传感器(包括里程仪、罗盘、加速度计等),通过多种传感信息的融合减少定位的误差,使用的融合算法多为基于卡尔曼滤波的方法。这类方法由于没有参考外部信息,在长时间的漫游后误差的积累会比较大。另一类方法在依靠内部传感器估计自身运动的同时,使用外部传感器(如激光测距仪、视觉等)感知环境,对获得的信息进行分析提取环境特征并保存,在下一步通过对环境特征的比较对自身位置进行校正。但这种方法依赖于能够取得环境特征。
SLAM的三个基本问题
Leonard和Durrant-Whyte将移动机器人完成任务定义为三个问题“Wheream I?”、“Wheream I going?”和“Howdo I getthere”,就是定位、目标识别和路径规划,为了能实现导航,移动机器人需要靠本体感受传感器和环境感知传感器来实现对本体位姿估计和外部环境位姿的定位。依据环境空间的描述方法,Desouza等将视觉导航的方法化为三类:
(1)已知地图的导航(Map-BasedNavigation):表示地图的方法几何特征(GeometricPrimitives)、拓扑特征(TopologicalFeatures)或占据栅格(OccupancyGrids)移动机器人依据这些已知的环境地图进行导航。
(2)地图建立的导航(Map-Building-BasedNavigation):在没有已知环境地图的情况下,移动机器人通过自身的导航运动和传感器的不断感知更新来进行导航。
(3)未知环境的导航(MaplessNavigation):相对于上面两种方法,在实时的动态环境中无法建立明确的地图表达形式,更多的是通过传感器获得的观测信息用来识别或者跟踪环境中的物体来导航。
但是由于感知信息的不确定性,移动机器人很难实现定位的准确,因而,在未知环境中的定位成为最关键的问题。
定位(Wheream I?)是实现自主能力的最基本问题,是为了确定机器人在运行环境中相对于世界坐标系的位置及其本身的位姿。
移动机器人的定位与其它领域研究课题的关系如图所示:
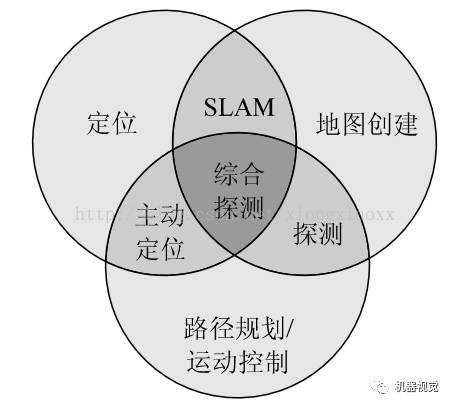
图 SLAM与各领域关系图
现有的移动机器人自主定位方法主要是局部定位和全局定位。局部是通过测量相对于机器人初始位姿的距离和方向来确定当前的位姿,但随着时间的累计造成定位的误差较大,无法精确定位。全局定位则通过测机器人的绝对位置来定位,定位的精度较高,并且可以用来修正局部定位的定位误差。
现在移动机器人定位的方法大致可分为三类
相对定位(RelativePositionMeasurements):主要依靠内部本体感受传感器如里程计(Odometry)、陀螺仪(Gyroscopes)等,通过给定初始位姿,来测量相对于机器人初始位姿的距离和方向来确定当前机器人的位姿,也叫做航迹推测(DeadReckoning, DR)。
绝对定位(AbsolutePosition Measurements):主要采用主动或被动标识(Activeor Passive Beacons)、地图匹配(MapMatching)、全球定位系统(GlobalPositioning System,GPS)、或导航信标(LandmarkNavigation)进行定位。位置的计算方法包括有三角测量法(Triangulation)、三边测量法(Trilateration)和模型匹配算法(ModelMatching)等。
组合定位(CombinedPositionMethod):虽然相对定位这种方法能够根据运动学模型的自我推算移动机器人的位姿和轨迹而且具有自包含的有点。但是不可避免地会存在随时间的增加和距离的增加而增加的累积航迹误差。在绝对定位中,地图匹配技术处理数据速度较慢,而信标或标识牌的建设和维护成本太高,GPS又只能在室外使用。由于单一定位的方法的缺陷,移动机器人定位仍然是基于航迹的推算与绝对位姿和轨迹矫正相结合起来。

AI专家问答平台





