【泡泡一分钟】DREGON:用于嵌入式无人机声源定位的数据集和方法
每天一分钟,带你读遍机器人顶级会议文章
标题:DREGON:Dataset and Methods for UAV-Embedded Sound Source Localization
作者:Martin Strauss, Pol Mordel, Victor Miguet and Antoine Deleforge
来源:IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS),2018
编译:曹利浩
审核:颜青松,陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

声源定位是指通过探测到的声音确定出声源的方向和距离(翻译自维基百科)。
本文介绍了一个新的公开数据集DREGON,用于推动声源定位相关研究,采集设备为一个嵌入麦克风阵列的无人机。具备了声源定位能力的无人机可用于人员搜救等用途。
数据集和常用声源定位方法的MATLAB代码可获取自:http://dregon.inria.fr/
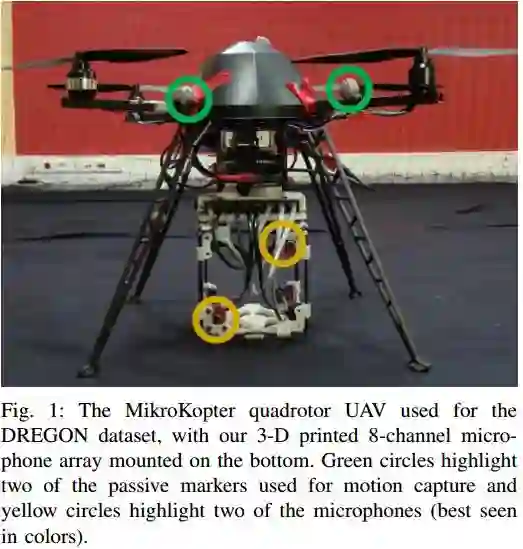
数据集中包含两种音频记录:干净的和嘈杂的,它们都被精确的运动捕获系统连续标注出了目标声源的3D位置。另外还包含各种人们感兴趣的信号,例如所有时刻各个转子的转速和惯性测量值。除了介绍数据集之外,本文还重点阐述了嵌入式无人机声源定位这一新兴任务的具体属性、挑战和机遇。使用本数据集评估和比较了几种方法,并考虑了实时性。在高噪声条件下,宽带源定位获得了非常有希望的结果,而语音定位在极端噪声水平下仍然是个挑战。
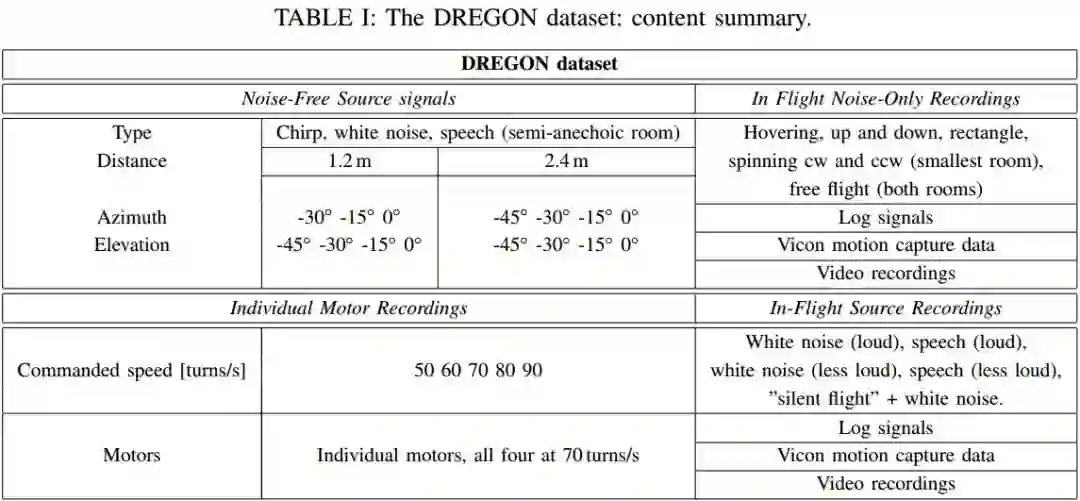
数据集内容概要
常用方法在DREGON数据集上的结果


Abstract
This paper introduces DREGON, a novel publicly-available dataset that aims at pushing research in sound source localization using a microphone array embedded in an unmanned aerial vehicle (UAV). The dataset contains both clean and noisy in-flight audio recordings continuously annotated with the 3D position of the target sound source using an accurate motion capture system. In addition, various signals of interests are available such as the rotational speed of individual rotors and inertial measurements at all time. Besides introducing the dataset, this paper sheds light on the specific properties, challenges and opportunities brought by the emerging task of UAV-embedded sound source localization. Several baseline methods are evaluated and compared on the dataset, with real-time applicability in mind. Very promising results are obtained for the localization of a broad-band source in loud noise conditions, while speech localization remains a challenge under extreme noise levels.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com





