加入极市专业CV交流群,与 10000+来自港科大、北大、清华、中科院、CMU、腾讯、百度 等名校名企视觉开发者互动交流!
同时提供每月大咖直播分享、真实项目需求对接、干货资讯汇总,行业技术交流。关注 极市平台 公众号 ,回复 加群,立刻申请入群~
来源:本文授权转自知乎作者郑哲东,https://zhuanlan.zhihu.com/p/130220572。未经作者允许,不得二次转载。
论文题目: Rectifying Pseudo Label Learning via Uncertainty Estimation for Domain Adaptive Semantic Segmentation
论文地址:
https://arxiv.org/pdf/2003.03773.pdf
作者:Zhedong Zheng, Yi Yang
What:
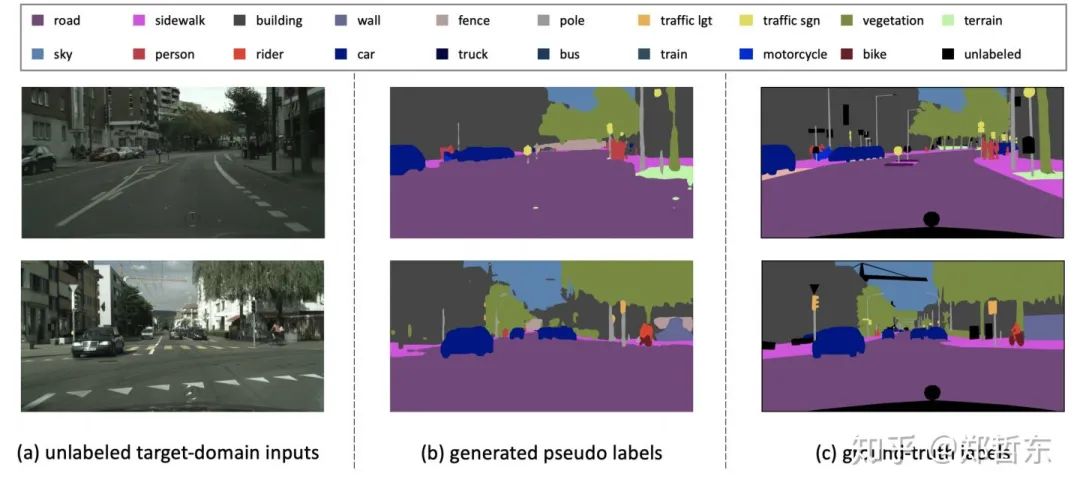
本文研究的是领域迁移问题中错误的伪标签(Pseudo Label)的问题,探讨了如何自动修正这种伪标签。
之前的伪标签往往通过人为卡阈值(Threshold) 的方式来学高置信度的伪标签(Pseudo Label),而忽略低置信度的标签。但是这个阈值(Threshold) 往往很难决定。
我们思考如何定这个阈值,其实会发现这个阈值取决于 source 和 target 有多接近,如果source域 和 target 域 完全一样,那么阈值甚至可以卡到0.999,大多数data都有很确定的label,那全部样本都可以拿来训练;但如果source域 和 target 域 完全不一样, 那么阈值再怎么卡,都没有用,因为所有的pseudo label都是noisy的。
所以在做domain adpation的问题就在于 在实际场景中,我们往往只能凭经验来 提前设置阈值 让模型来学伪标签。这是不合理的,或者卡得太高或者太低都会影响模型学习的。所以本文我们提出用不确定性来作为阈值,等同于自动学一个阈值出来。
How:
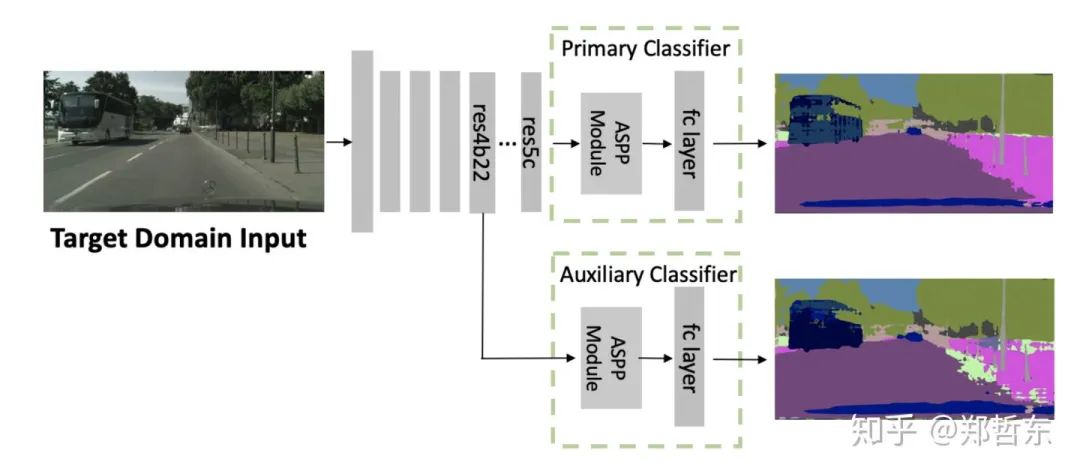
其实本质思想很简单,我们利用了分割模型中的辅助分类器(本来只是用来防止梯度消失的)。结构如下图:有一个主分类器接在res5c后面,一个辅助分类器接在res4b22. (本文研究的是图像分割, 如果您研究的是图像分类,也可以对应到分类问题中InceptionNet 系列,包括NASNet也是需要浅层辅助分类器的。)
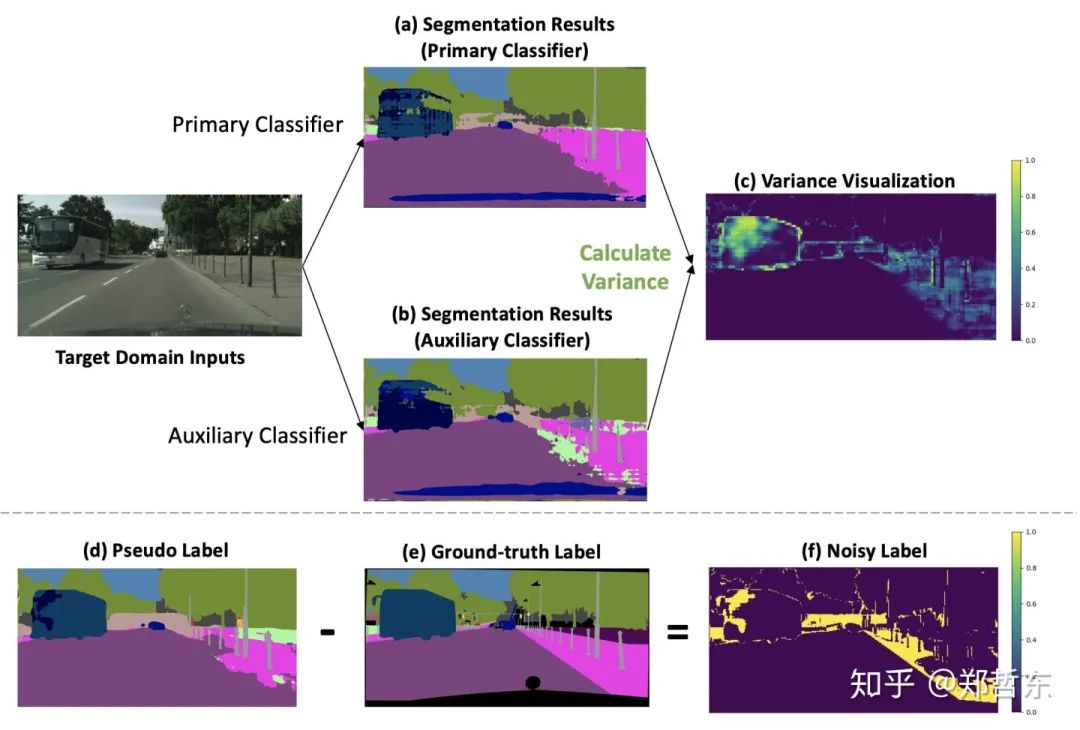
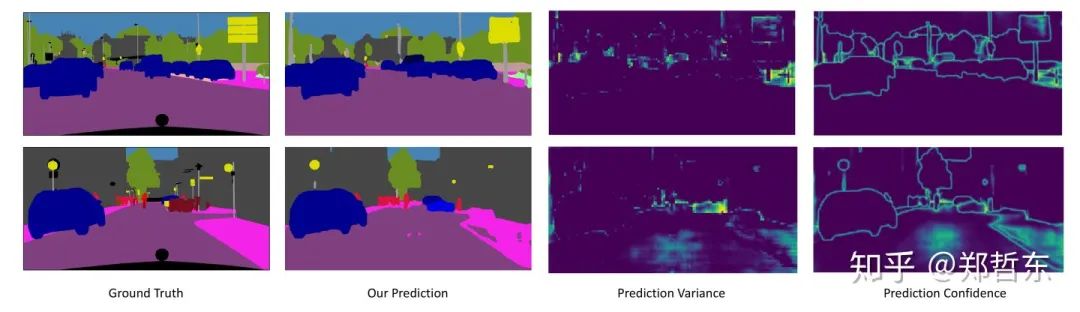
我们观察到 伪标签错误的地方,往往是 两个分类器预测不同结果的地方(Prediction Variance)。如下图:
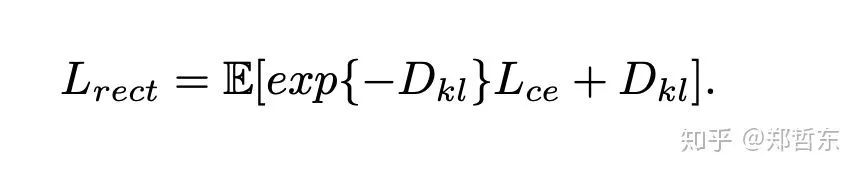
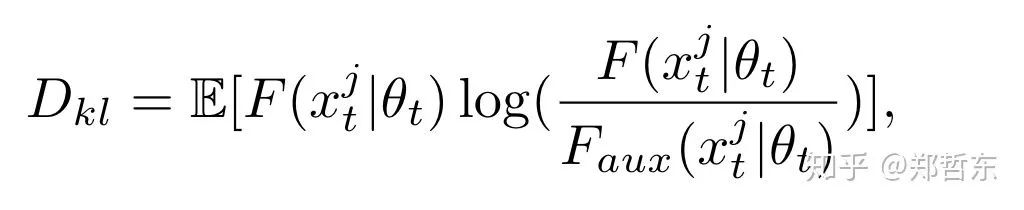
所以很自然的我们对于cross-entropy loss做了一个修正:其中D{kl} 就是主分类器和辅助分类器预测结果的KL距离(也可以叫作Prediction Variance),如果差异大,则这个距离也就大,那么Lrect 对于这种不确定的样本,就不惩罚(因为pseudo label很可能是错的)。如果没有后面+D_{kl} 这一项,模型很懒,会趋向把所有pseudo label都说成是不确定的,那么Lrect就等于0了。为了避免这种情况,所以我们加了一个+D_{kl} 。
我们可以杠一下,其实原来的取阈值,是基于confidence, confidence高,model就学这种pseudo label,我们这边能不能用 confidence呢?答案是不太好。
因为pseudo label训练的时候就是增加这个pseudo label的confidence。
这样还是无法决定哪些样本可信。
最后实验里,我也可视化了一下,confidence 和uncertainty的对比,如下图:
(我们用的uncertainty 本质是 prediction variance,和错误pseudo label的区域有更明显的overlapping )
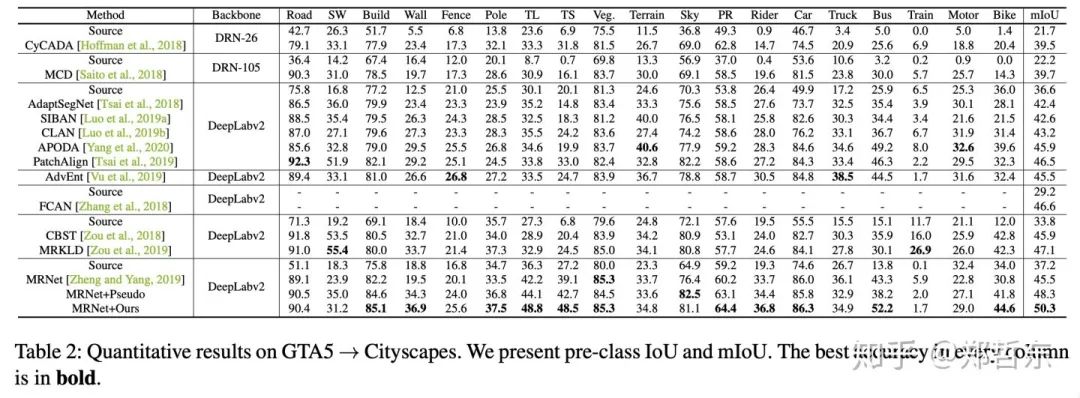
同时,我们方法对于一些segmentation里面占得面积小的类别有奇效。因为传统方法按照confidence一刀切。往往数量小的类别(自行车Bike和骑行人Rider)这种类别吃亏,因为confidence score往往只有0.7,0.8,会被0.9的硬阈值卡掉。
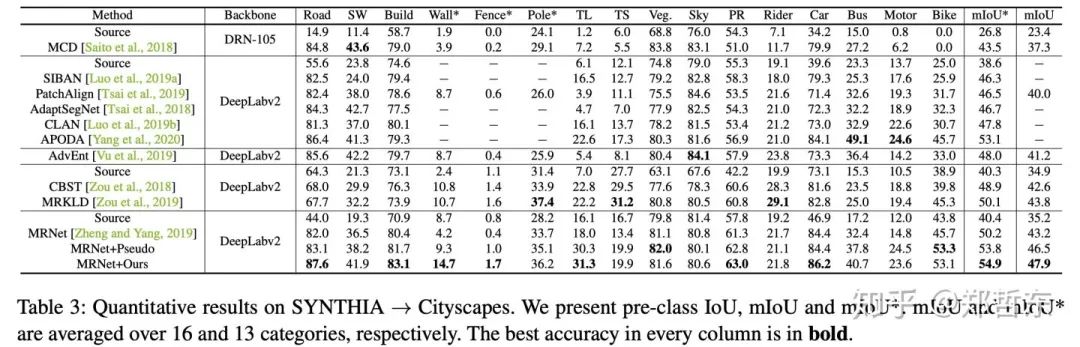
最后我们的方法可以在 两个常用benchmark (GTA5->Cityscapes 和 SYNTHIA -> Cityscapes)上有提升。
并且和其他方法是互补的关系。
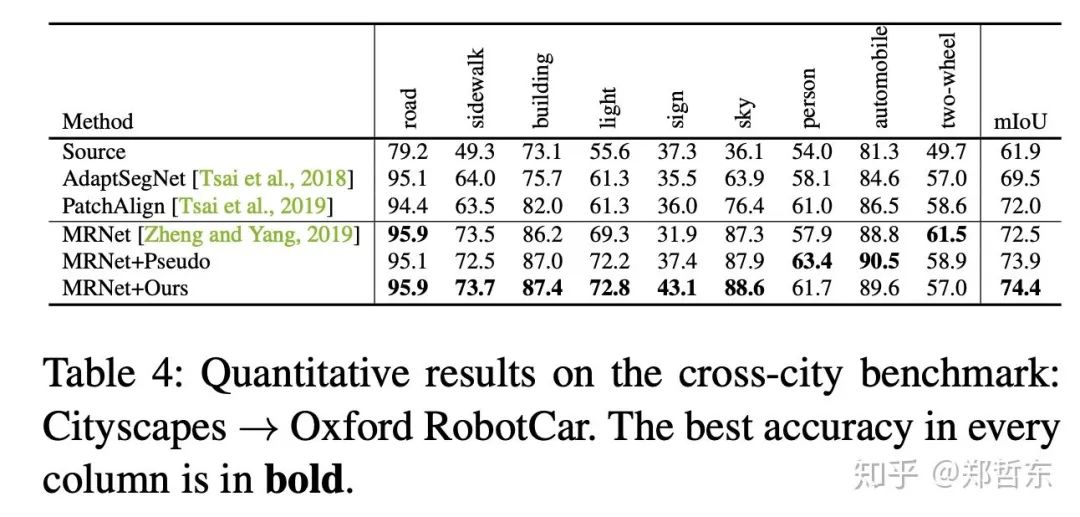
在一个小数据集上也有提升,但是由于类别比较少,所以提升不是很明显 (Cityscapes->Oxford RobotCar)。
40万奖金的AI移动应用大赛,参赛就有奖,入围还有额外奖励
![]()
添加极市小助手微信
(ID : cv-mart)
,备注:
研究方向-姓名-学校/公司-城市
(如:目标检测-小极-北大-深圳),即可申请加入
目标检测、目标跟踪、人脸、工业检测、医学影像、三维&SLAM、图像分割等极市技术交流群
,更有
每月大咖直播分享、真实项目需求对接、求职内推、算法竞赛、
干货资讯汇总、行业技术交流
,
一起来让思想之光照的更远吧~
![]()
△长按添加极市小助手
![]()
△长按关注极市平台,获取最新CV干货
觉得有用麻烦给个在看啦~ ![]()