【泡泡一分钟】单目VINS系统的重定位,全局优化和地图融合
每天一分钟,带你读遍机器人顶级会议文章
标题:Relocalization, Global Optimization and Map Merging for Monocular Visual-Inertial SLAM
作者:Tong Qin, Peiliang Li, and Shaojie Shen
来源:arXiv2018
播音员:SophieChu
编译:王慧国
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

大家好,今天为大家带来的文章是——单目VINS系统的重定位,全局优化和地图融合,该文章发表于arXiv2018。
单目VINS系统包括一个相机和一个低成本的惯性测量单元,并且是估计6自由度(DOF)状态的流行方法。然而,局部精确的视觉惯性里程计VIO很容易就会漂移并且不能提供绝对姿态估计。利用历史信息去重定位和矫正漂移已经称为一个火热的话题。
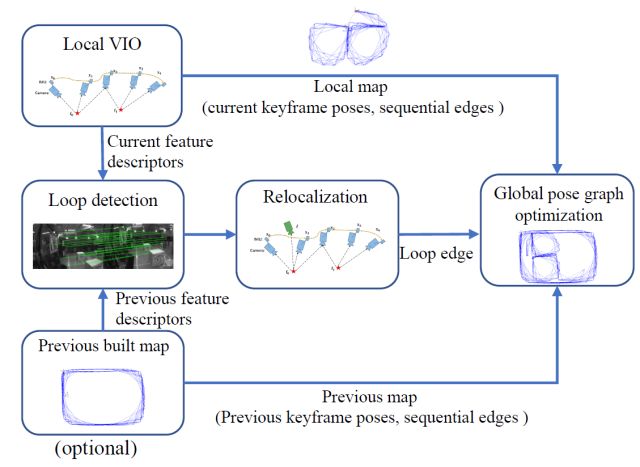
这个提出的VINS系统的完整流程图。
在这篇文章中,我们提出了一种单目视觉惯性SLAM系统(VINS),它能够进行重定位并且得到在先前地图中的绝对姿态。4DOF的姿态图优化将会矫正漂移和实现全局的一致性。这个4DOF包括x,y,z和偏航角,它是视觉惯性系统的实际漂移方向。另外,提出的系统能够通过高效的存储和下载地图,对地图进行重用。当前地图和先前的地图能够通过全局姿态图优化的方式进行融合。我们在公开数据集验证了我们系统的精度并且与其他优秀方法进行了对比。我们还评估了该系统在户外大场景下的地图融合能力。地图重用的源代码被集成到我们的公开项目代码中,即VINS-Mono。项目链接:https://github.com/HKUST-Aerial-Robotics/VINS-Mono。
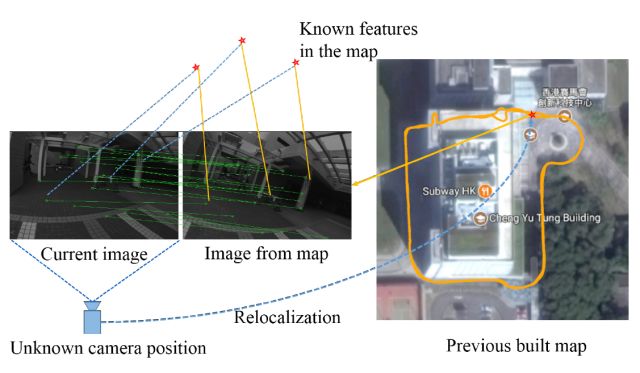
上图显示了VINS系统对相机位置进行实时定位。图中表明它可以利用预先建立好的地图进行重定位,得到原先地图中的绝对位姿。
Abstract
The monocular visual-inertial system (VINS), which consists one camera and one low-cost inertial measure-ment unit (IMU), is a popular approach to achieve accurate DOF state estimation. However, such locally accurate visual-inertial odometry is prone to drift and cannot provide absolute pose estimation. Leveraging history information to relocalize and correct drift has become a hot topic. In this paper, we propose a monocular visual-inertial SLAM system, which can relocalize camera and get the absolute pose in a previous-built map. Then 4-DOF pose graph optimization is performed to correct drifts and achieve global consistent. The 4-DOF contains x, y, z, and yaw angle, which is the actual drifted direction in the visual-inertial system. Furthermore, the proposed system can reuse a map by saving and loading it in an efficient way. Current map and previous map can be merged together by the global pose graph optimization. We validate the accuracy of our system on public datasets and compare against other state-of-the-art algorithms. We also evaluate the map merging ability of our system in the large-scale outdoor environment. The source code of map reuse is integrated into our public code, VINS-Mono.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
点击阅读原文,即可获取本文下载链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com





