【泡泡一分钟】像素阵列处理器的视觉里程计
每天一分钟,带你读遍机器人顶级会议文章
标题:Visual Odometry for Pixel Processor Arrays
作者:Laurie Bose, Jianing Chen, Stephen J. Carey, Piotr Dudek, Walterio Mayol-Cuevas
来源:International Conference on Computer Vision (ICCV 2017)
编译:黄思宇
审核:颜青松 陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

本文提出了一种在像素阵列处理器(PPA)上估计带限制的自运动的方法。像素阵列处理器具备处理和存储图像传感器的像素数据的能力,可以直接在图像平面上进行快速且低功耗的并行运算。与标准的将图像传输到外部通用处理单元的视觉处理流水线不同,作者的方法基于PPA进行所有计算,输出相机的运动估计,包含对三维的旋转和一维的无尺度的平移的估计。
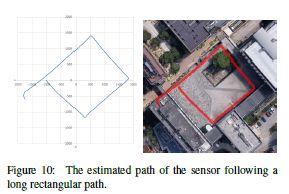
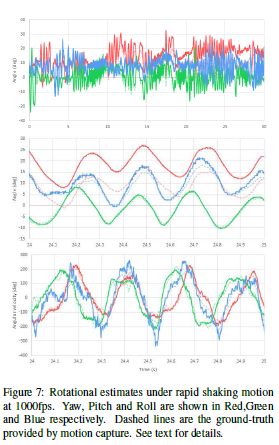
本文介绍了仅使用PPA相机进行处理的图像缩放、旋转和对齐的方法,这些方法是进行运动估计的基础。并且在SCAMP-5视觉芯片上演示了该算法,在2W的功耗水平下实现了大于1000HZ的帧更新率。

Abstract
We present an approach of estimating constrained ego-motion on a Pixel Processor Array (PPA). These devices embed processing and data storage capability into the pixels of the image sensor, allowing for fast and low power parallel computation directly on the image-plane. Rather than the standard visual pipeline where by whole images are transferred to an external general processing unit, our approach performs all computation upon the PPA itself, with the camera’s estimated motion as the only information output. Our approach estimates 3D rotation and a 1D scaleless estimate of translation. We introduce methods of image scaling, rotation and alignment which are performed solely upon the PPA itself and form the basis for conducting motion estimation. We demonstrate the algorithms on a SCAMP-5 vision chip, achieving frame rates >1000Hz at 2W power consumption.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com



