【泡泡点云时空】3DFeat-Net:用于点云配准的弱监督学习的局部3D特征(ECCV2018-3)
泡泡点云时空,带你精读点云领域顶级会议文章
标题:3DFeat-Net: Weakly Supervised Local 3D Features for Point Cloud Registration
作者:Zi Jian Yew and Gim Hee Lee,Department of Computer Science, National University of Singapore
来源:ECCV 2018
播音员:卜德飞
编译:孔令升
审核:郑森华,吕佳俊
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

在本文中,我们提出了3DFeat-Net,它使用弱监督学习来学习点云匹配的3D特征检测器和描述子。 与许多现有方法不同,我们不需要手动标注匹配点集。 相反,我们对来自GPS / INS标记的3D点云使用对齐和注意力机制来学习特征点匹配,而无需明确指定它们。 我们创建了训练和基准户外激光雷达数据集,实验表明,3DFeat-Net在这些重力对齐数据集上获得了最先进的性能。
结构
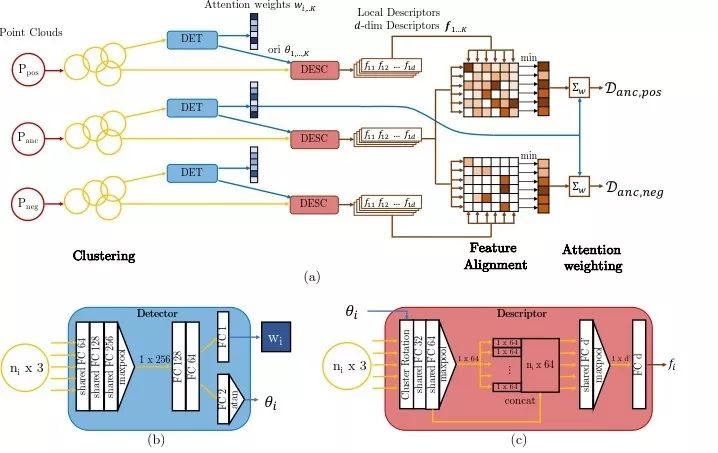
上图展示了3DFeat-Net的三分支siamese网络系统结构。每个分支将整个点云P作为输入。对于每个集群Ci,一个方向θi和注意力wi由检测器网络预测,如图(b)所示。然后,描述子网络使用预测的方向θi将Ci旋转到规范的结构,并计算描述子fi如图(c)所示。使用对齐目标来比较各个描述子fi,具体而言,两个点云P(m)和P(n)之间的所有描述符对之间的距离由下式给出:

在这个公式下,来自第一点云的每个描述子与第二点中最接近的描述子对齐。 直观地,在匹配点云对中,第一点云中的集群应该在第二点云中具有类似的集群。 对于非匹配对,上述距离简单地将描述子与最类似于其自身的描述子对齐,即最难对应的描述子。模型可以随机采样负点云。每个训练元组{P(anc),P(pos),P(neg)}制定三元组损失,如下:

实验
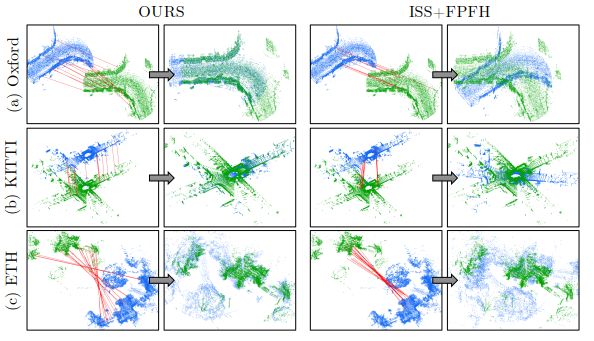
作者在几何配准问题上通过Oxford RobotCar,KITTI odometry,KITTI,ETH数据集测试了提出的关键点检测和描述算法。 对计算出的关键点和描述子执行最近邻匹配,并在这些最近邻匹配上使用RANSAC估计两个点云之间的刚性变换。文中定性配准结果如下图所示,使用文中的方法(左)和ISS + FPFH(右)仅显示在RANSAC之后保留的随机匹配子集,并且为了清楚起见在(c)中排除了地面。

Abstract
In this paper, we propose the 3DFeat-Net which learns both 3D feature detector and descriptor for point cloud matching using weak supervision. Unlike many existing works, we do not require manual annotation of matching point clusters. Instead, we leverage on alignment and attention mechanisms to learn feature correspondences from GPS/INS tagged 3D point clouds without explicitly specifying them. We create training and benchmark outdoor Lidar datasets, and experiments show that 3DFeat-Net obtains state-of-the-art performance on these gravity-aligned datasets.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com



