【泡泡点云时空】SpiderCNN:利用参数化卷积滤波进行点集深度学习(ECCV2018-13)
泡泡点云时空,带你精读点云领域顶级会议文章
标题:SpiderCNN: Deep Learning on Point Sets with Parameterized Convolutional Filters
作者:Yifan Xu, Tianqi Fan, Mingye Xu, Long Zeng, and Yu Qiao
来源:ECCV 2018
播音员:林明
编译:郑森华,吕佳俊
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

深度神经网络已经在各种视觉任务中获得了显着的成功,但是将CNN应用于缺乏诸如3D点云的规则的底层结构的域仍然是具有挑战性的。为此,我们提出了一种新的卷积结构,称为SpiderCNN,可以有效地从点云中提取几何特征。 SpiderCNN由称为SpiderConv的单元组成,它通过参数化一系列卷积滤波器,将卷积运算从规则的栅格扩展到可嵌入的不规则点集。我们将滤波器设计为捕获局部测地信息的简单阶跃函数和确保表达性的泰勒多项式的乘积。SpiderCNN继承了经典CNN的多尺度层次结构,这使得它可以它提取语义深层特征。ModelNet40上的实验表明,SpiderCNN在标准基准测试中达到了92.4%的最先进精度,并且在分割任务上表现出了竞争力。
简介
我们提出了一种卷积架构SpiderCNN,它旨在直接从点云中提取特征。我们验证了其在分类和分段基准方面的有效性。通过离散化如图1所示的卷积积分公式,并在上使用一系列特殊的参数化非线性函数作为滤波器,我们为点云引入了一个新的卷积层SpiderConv。
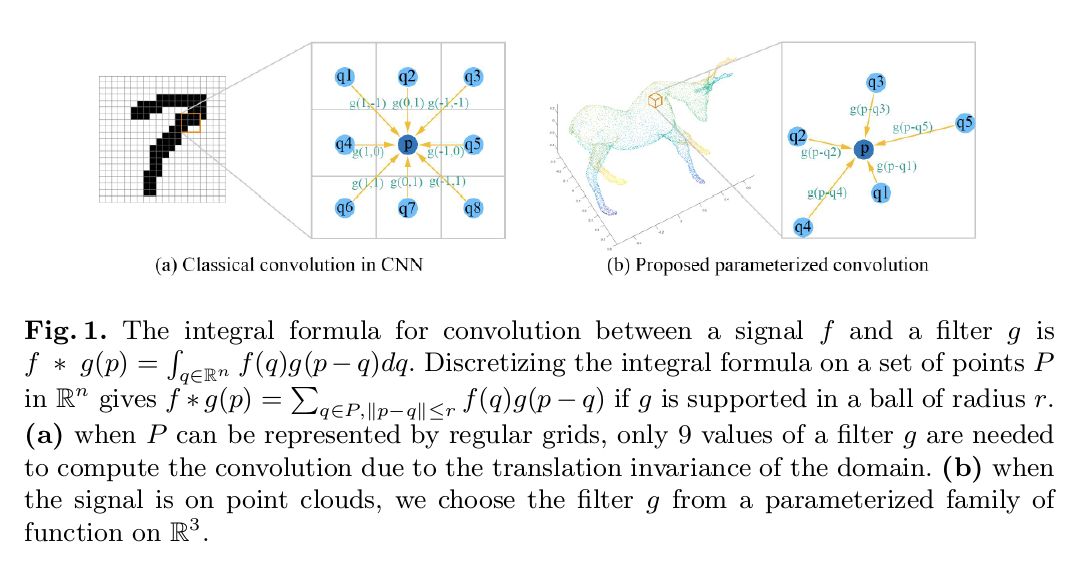
滤波器族被设计为具有表现力,同时仍然可以进行优化。我们结合简单的阶跃函数,用于捕获由局部测地距离描述的粗糙几何,具有3阶泰勒展开,这确保滤波器足够复杂以捕获复杂的局部几何变化。SpiderCNN继承了经典CNN的多尺度层次结构,这使得它可以它提取语义深层特征。
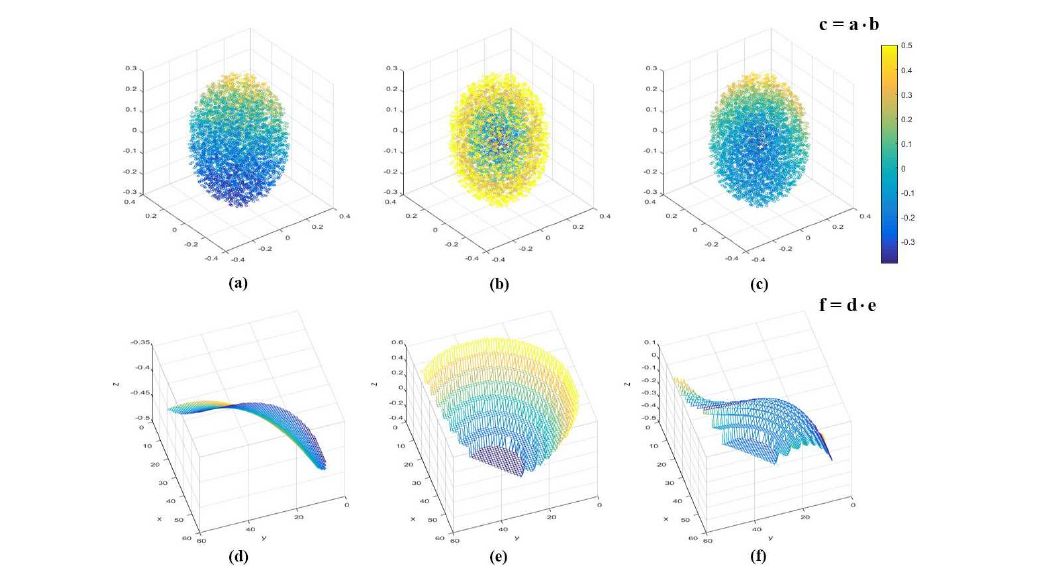
图2显示了设计的滤波器族的可视化
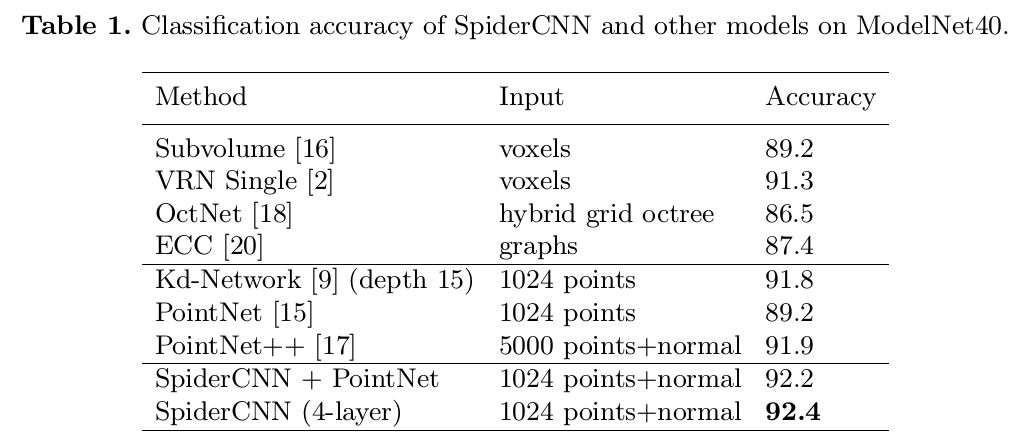
ModelNet40上的实验表明,SpiderCNN在标准基准测试中达到了92.4%的最先进精度,并且在分割任务上表现出了竞争力。

Abstract
Deep neural networks have enjoyed remarkable success for various vision tasks, however it remains challenging to apply CNNs to domains lacking a regular underlying structures such as 3D point clouds.Towards this we propose a novel convolutional architecture, termed SpiderCNN, to efficiently extract geometric features from point clouds. SpiderCNN is comprised of units called SpiderConv, which extend convolutional operations from regular grids to irregular point sets that can be embedded in Rn, by parametrizing a family of convolutional filters. We design the filter as a product of a simple step function that captures local geodesic information and a Taylor polynomial that ensures the expressiveness. SpiderCNN inherits the multi-scale hierarchical architecture from classical CNNs, which allows it to extract semantic deep features. Experiments on ModelNet40 demonstrate that SpiderCNN achieves stateof the-art accuracy 92.4% on standard benchmarks, and shows competitive performance on segmentation task.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com



