
本文是收录于CVPR2020的目标检测的新工作,从关键点检测的角度出发进行创新,提出了向心偏移和十字星可形变卷积等创新点,在COCO数据集上以48.0%的AP胜过所有现有的Anchor-free检测器,值得学习。
论文地址:https://arxiv.org/pdf/2003.09119.pdf
代码地址:https://github.com/KiveeDong/CentripetalNet
基于关键点的检测器已经取得了不错的性能。但是,错误的关键点匹配仍然广泛存在,并且极大地影响了检测器的性能。在本文中,提出了CentripetalNet,它使用向心偏移(centripetal shift)来配对来自同一实例的角corner关键点。
具体来说,CentripetalNet预测角点的位置和向心偏移,并匹配与其偏移结果对齐的角。因为联合了位置信息,本文的方法比传统的嵌入方法更准确地匹配角点。Corner pooling 将边界框内的信息提取到边界上。为了使这些信息在角落更清晰,本文设计了一个十字星形(cross-star)可变形卷积网络来进行特征自适应。此外,通过在CentripetalNet上引入一个mask预测模块,可以在在Anchor-free目标检测器上实现实例分割任务。
在MS-COCO test-dev数据集上,CentripetalNet不仅以48.0%的AP胜过所有现有的Anchor-free检测器,而且以40.2%的Mask AP达到了与最新实例分割方法相当的性能。
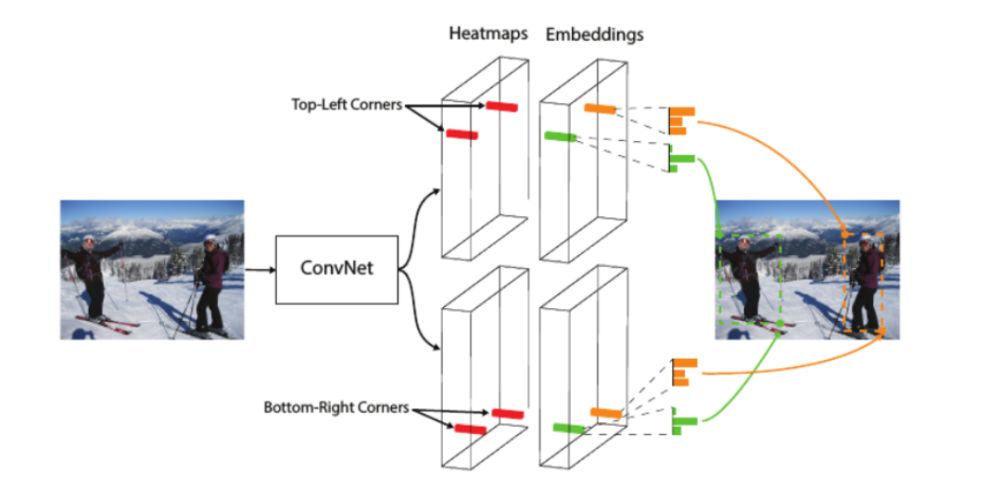
CornerNet的主要结构主要由以下3部分组成:
-
沙漏结构Hourglass:特征提取的Backbone,能够为后续的网络预测提供很好的角点特征图。
-
角点池化Corner Pooling:作为一个特征的池化方式,角点池化可以将物体的信息整合到左上角点或者右下角点。
-
预测输出:传统的物体检测会预测边框的类别与位置偏移,而CornerNet则与之完全不同,其预测了角点出现的位置Heatmaps、角点的配对Embeddings及角点位置的偏移Offsets。

